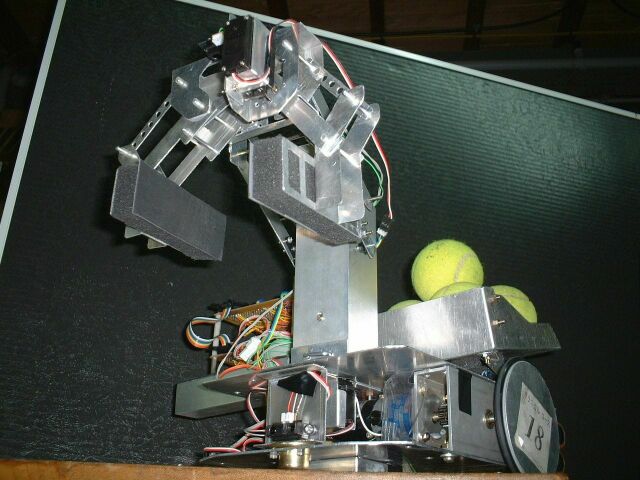
| 自立型,単独型 長300mm×幅350mm×高300mm, 重5kg, 速300mm/s ライントレース, デッドレコニング, 距離センサ, 光センサ, ハンド, アピール 豪快且つ繊細なハンドの動き。蝶のようにタワーを取り、蜂のように捨てる。 ロボットの特徴 ライントレースとデッドレコニングにより対象物まで移動し、 ロボット前部のPSDセンサ1でより正確な対象物の位置を検出する。 対象物はサーボモータによるハンドですばやく挟み取る。 ランダムエリアにおいては、まず、PSDセンサ2で対象物の高さを見分け、 タワーかそうでないかを判断し、他の分別は、アーム部分に取り付けた、 ひずみゲージにより行う。 作業を効率的に行うためにロボットの後部に箱を取り付けた。 |