| Self-content,
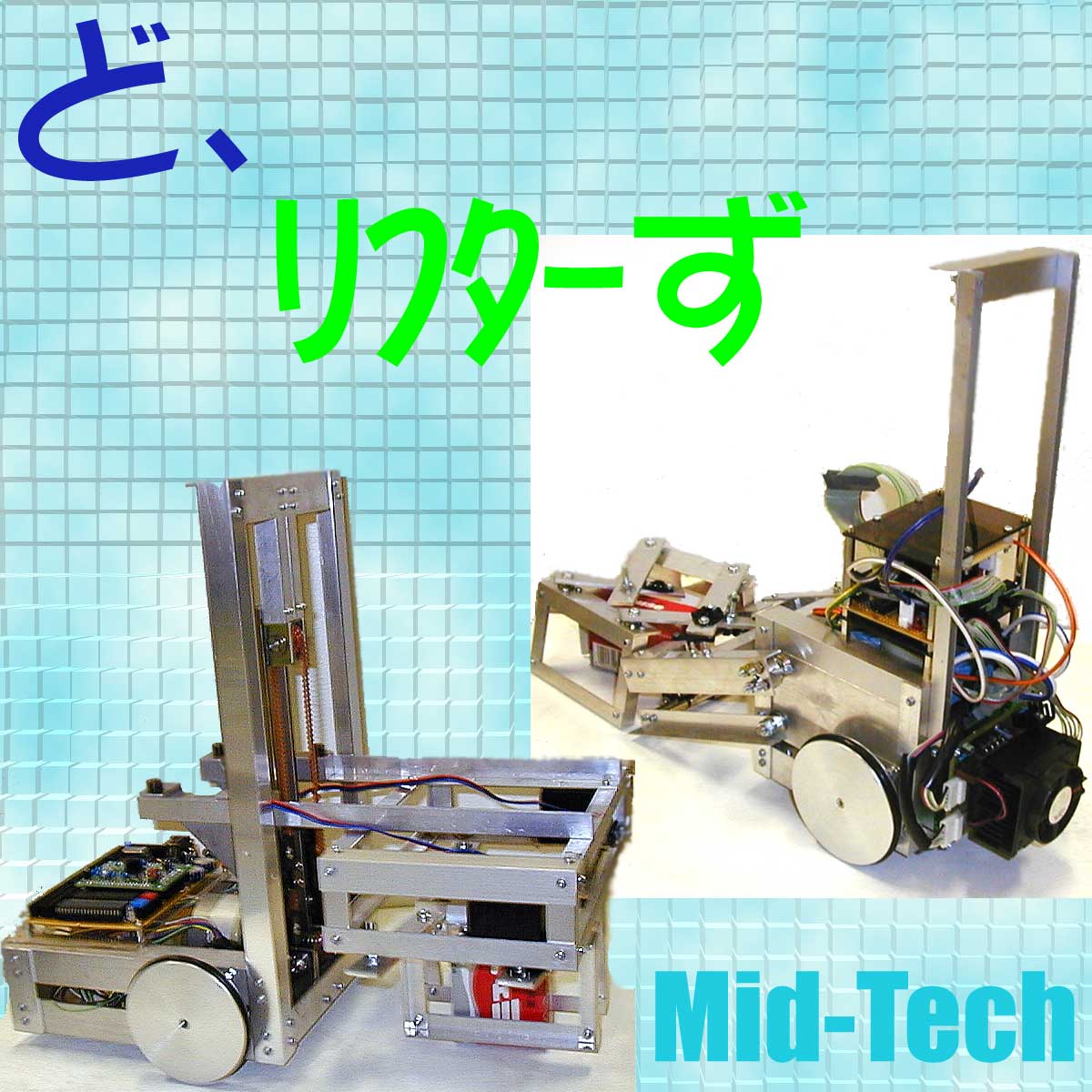
Multi-robots L:430mm * W:225mm * H:395mm, 8kg, 700mm/s Line-trace, Distance sensor, Sensors using lightwave, Co-operation, Hand, Appeals: 足回りを2相ユニポーラ定電圧駆動からバイポーラ定電流マイクロステップ駆動に変え、加減速をすることで同じモーターで去年に比べて14倍以上の高速化を図りました。 Characteristics: 物を探す為にPSDをそれぞれ1個搭載しており、物(タワー)の判別は高さをアーム先端の透過型センサーによって行っています。1台は直動機構(ステッピングモーター)でアームを上下させ、もう一台は上下用の平行リンクをギアドモーターとオーディオ用ボリュ−ムとPICを組み合わせた自作DCサーボで制御しています。通信はランダムコースのマシンがもう一台に常に大まかな現在位置と次の移動先の情報を常に送っており、もう一台は邪魔をしないように行動させています。 |