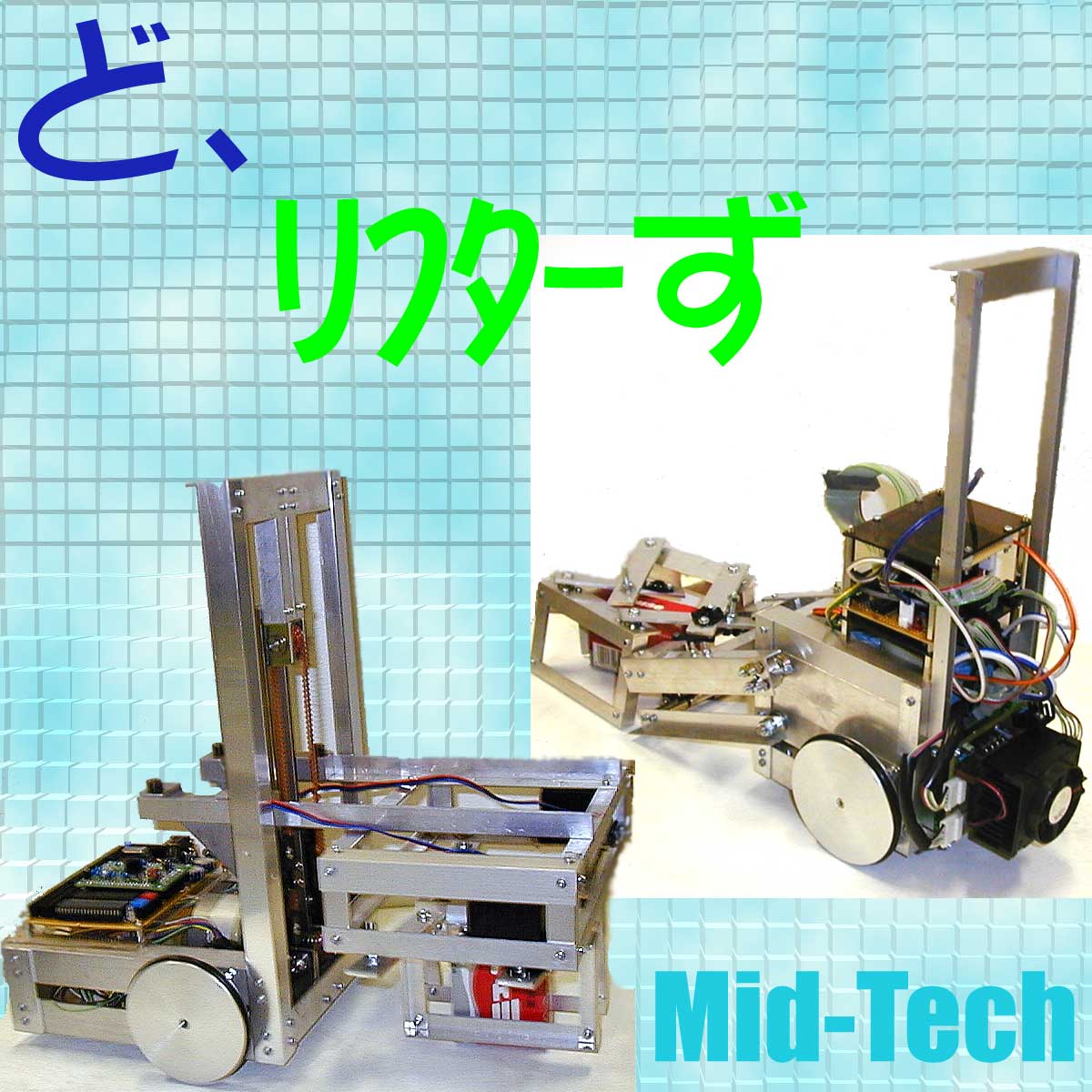
| ��Ω��,ʣ���� Ĺ430mm����225mm�߹�395mm, ��8kg, ®700mm/s �饤��ȥ졼��, ��Υ����, ������, ��Ĵư��, �ϥ��, ���ԡ��� �������˥ݡ������Ű���ư����Х��ݡ�������ή�ޥ��������ƥå�ư���Ѥ����ø�®�뤳�Ȥ�Ʊ���⡼�����ǵ�ǯ����٤�14�ܰʾ�ι�®����ޤ�ޤ����� ���ܥåȤ���ħ ʪ��õ���٤�PSD�줾�죱����ܤ��Ƥ��ꡢʪ�ʥ���ˤ�Ƚ�̤Ϲ⤵������ü��Ʃ�᷿�����ˤ�äƹԤäƤ��ޤ��������ľư�����ʥ��ƥåԥ⡼�����ˤǥ������岼�������⤦����Ͼ岼�Ѥ�ʿ�ԥ���ɥ⡼�����ȥ����ǥ����ѥܥ��ݥ��PIC���Ȥ߹�碌������DC�����ܤ����椷�Ƥ��ޤ����̿��ϥ����ॳ�����Υޥ��⤦����˾����ޤ��ʸ��߰��֤ȼ��ΰ�ư��ξ���������äƤ��ꡢ�⤦����ϼ���ʤ��褦�˹�ư�����Ƥ��ޤ��� |