| Self-content,
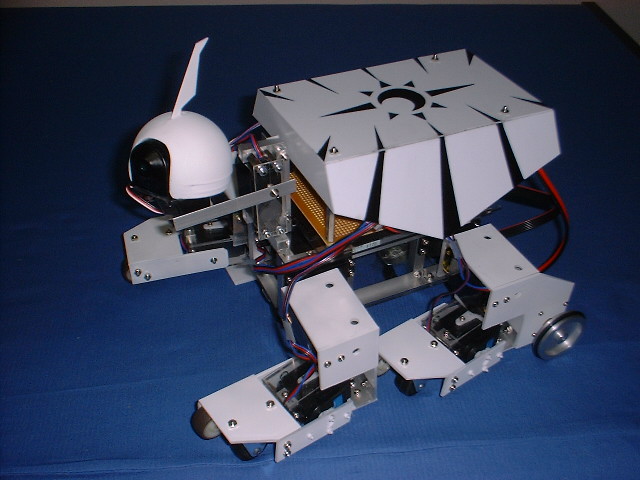
Single-robot L:300mm * W:220mm * H:180mm, 3.0kg, 15mm/s Line-trace, Dead-reconing, Distance sensor, Appeals: 車輪の方が圧倒的に有利な本大会で、あえて4足歩行ロボを出すならこれだ!と思って造ったロボです。 Wheels have very big advantage in this robot contest. But I wanted to make a robot walking with legs. So I made this leg-wheel heybrid robot. Characteristics: ラジコン用サーボを用いた4足歩行と、DCモータを用いた車輪走行が可能です。車輪走行時には前足はボールを捕らえる手となります。 He can walk with 4 legs actuated by RC servo units. And he can also run with 2 wheels driven by DC motors. When he runs with wheels, he can use his forelegs as arms to catch balls. |