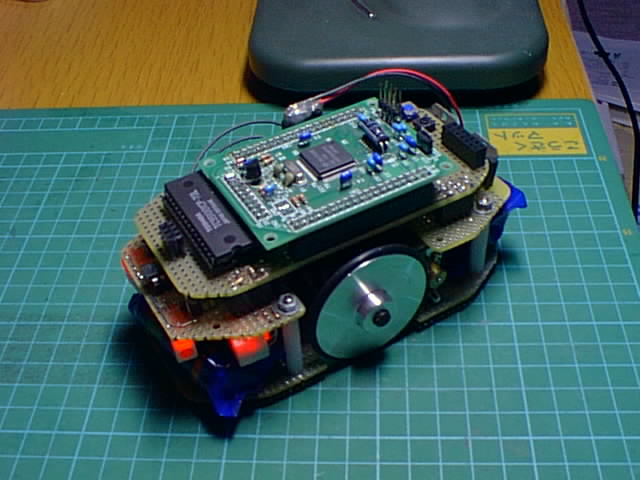
| 自立型,単独型 長140mm×幅90mm×高80mm, 重0.5kg, 速1000mm/s デッドレコニング, 距離センサ, ビジョンセンサ, 光センサ, アピール 外形と距離センサーは森永さんの講座(http://www02.so-net.ne.jp/~morinaga/)のBasicMicromouseほぼそのままですが、ステッピングモーターではなくDCモーター&エンコーダーを使用している点が異なります。 ロボットの特徴 DCモーター2個で走行します。ロータリーエンコーダで現在位置を測ります。 光センサーで壁と対象物を検知します。 CMOSカメラで対象物を判別します。 |