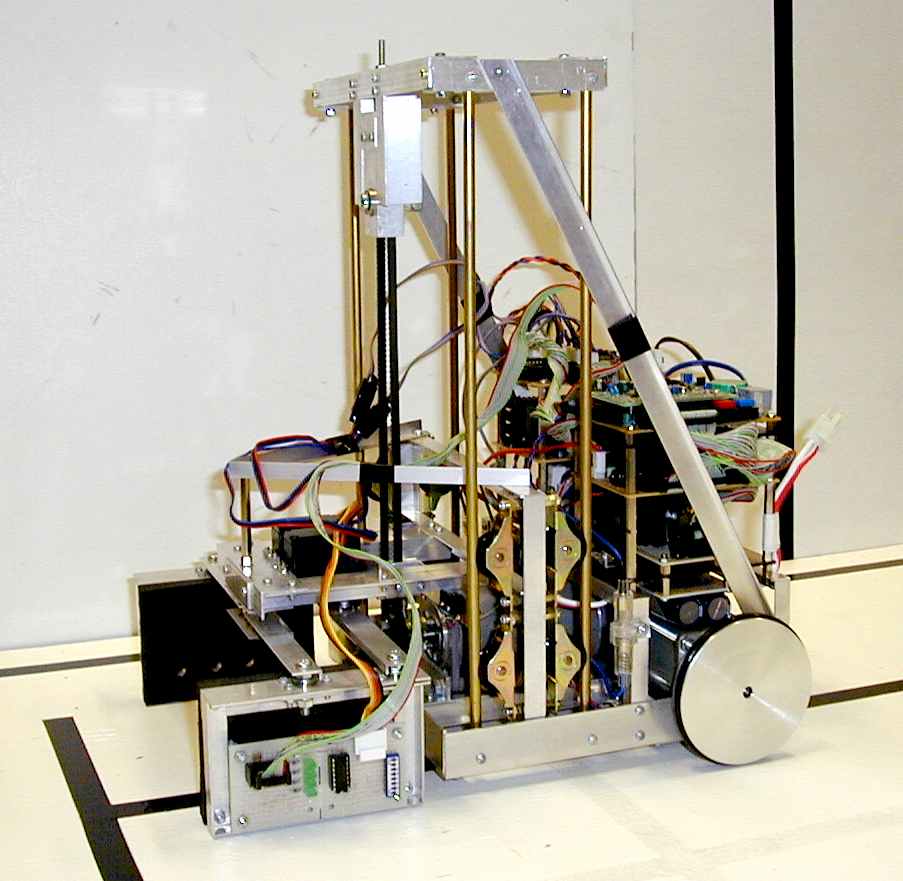
| 非自立型,単独型 長430mm×幅257mm×高396mm, 重7.38kg, 速2700mm/s デッドレコニング, 距離センサ, 光センサ, ハンド, アピール 重量の約半分は3個の巨大ステッピングモーターが占めています。 本体の構造を可能な範囲でシンプルにしたことで、少ない材料費で、1週間で本体(回路・プログラムを除く機構部分)を完成させることができました。滑らかな加減速をするために、16MHz32bit分解能のウエイトを用意しました。 ロボットの特徴 高トルクステッピングモーターを使用した高速に上下するハンドに取り付けられた4つ透過型赤外線センサにより、対象物を高さの違いからすばやく判別します。 ラインの検出用に反射形赤外線センサを12個搭載し、十字のライン部以外でも、ロボットが線と平行であるかどうかを判断し、必要であれば位置・角度の補正を行うことで、暴走を防いでいます。 センサーとマイコンの接続には、ラダー抵抗によるD/AとA/D変換入力を使い、パラレルポートの節約をしています。 |