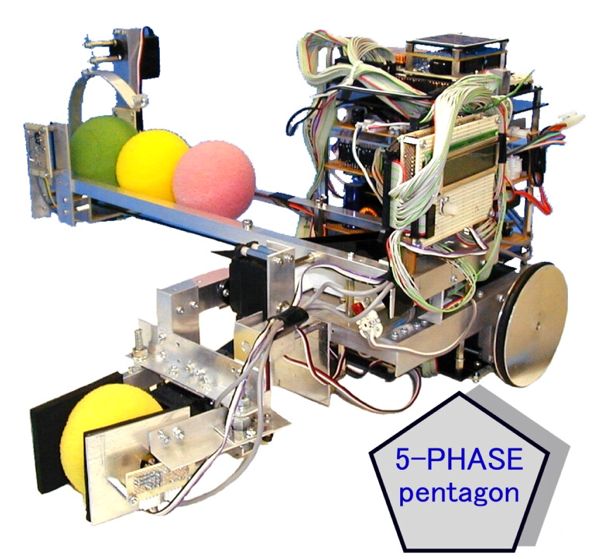
| 非自立型,単独型 長410mm×幅449mm×高259mm, 重5.3kg, 速3100mm/s デッドレコニング, 距離センサ, 光センサ, ハンド, アピール 7色に光るLEDと、CdSを使って、ボールを取り込む際に色の判別をし、順番をキューとして記憶します。割り込みによって、走行しながら他の作業を行い、時間の短縮を図りました。ラインの検出用に反射形赤外線センサを16個搭載し、十字のライン部以外でも、ロボットが線と平行であるかどうかを判断し、必要であれば位置・角度の補正を行っています。25V20Aのスイッチング電源をDC110〜160V入力の5V20A出力のDC-DCコンバーターを5個使って自作しました。 ロボットの特徴 足回りにはペンタゴン結線の5相ステッピングモーターを使い、スイッチング方式の定電流回路、Verilog-HDL記述のCPLDを使った励磁シーケンサ、ハイサイド側のゲートドライブのフローテング電源にDC-DCコンバーターを用いたFETブリッジ等を全て自作しました。また、滑らかな加減速をするために、25MHz(32bit)分解能ののウエイトを用意しました。 |