| Self-content,
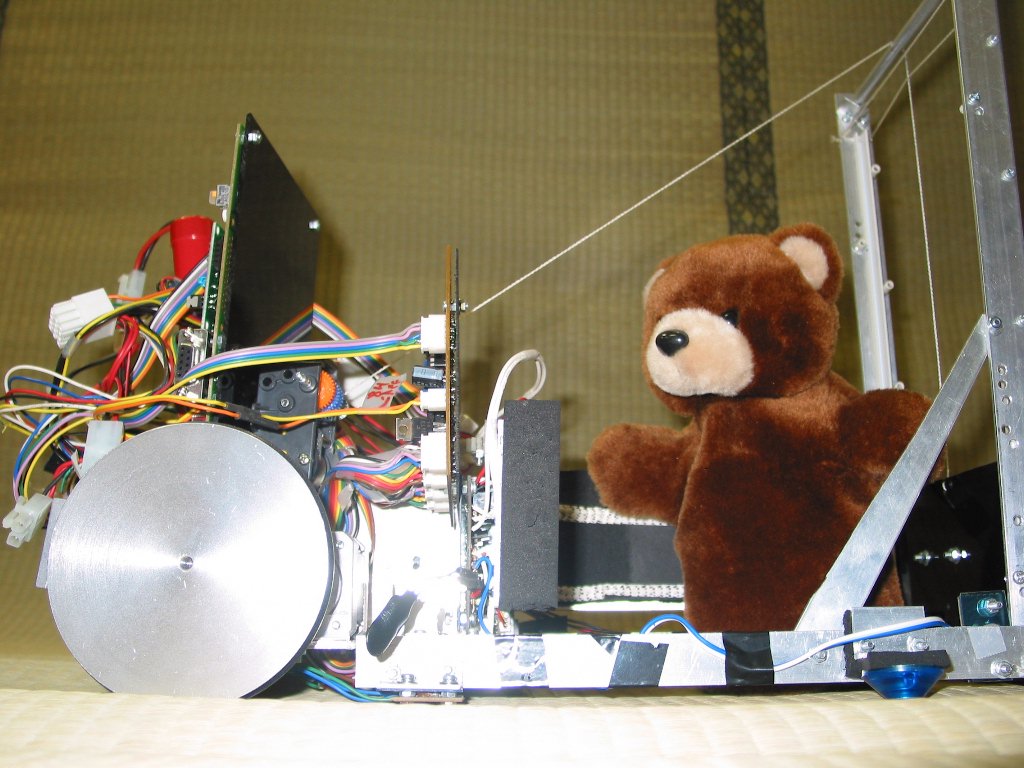
Single-robot L:411mm * W:250mm * H:348mm, 5kg, 500mm/s Line-trace, Distance sensor, Sensors using lightwave, Hand, Appeals: タワーを攻略するための構造になっている。 Characteristics: 基本的に物を取る為の移動はライントレースを使用している。物のサーチにはPSDとH8のAD変換を利用している。物はシャッターとハンドを併用して取ることにした。 |