| With external devices,
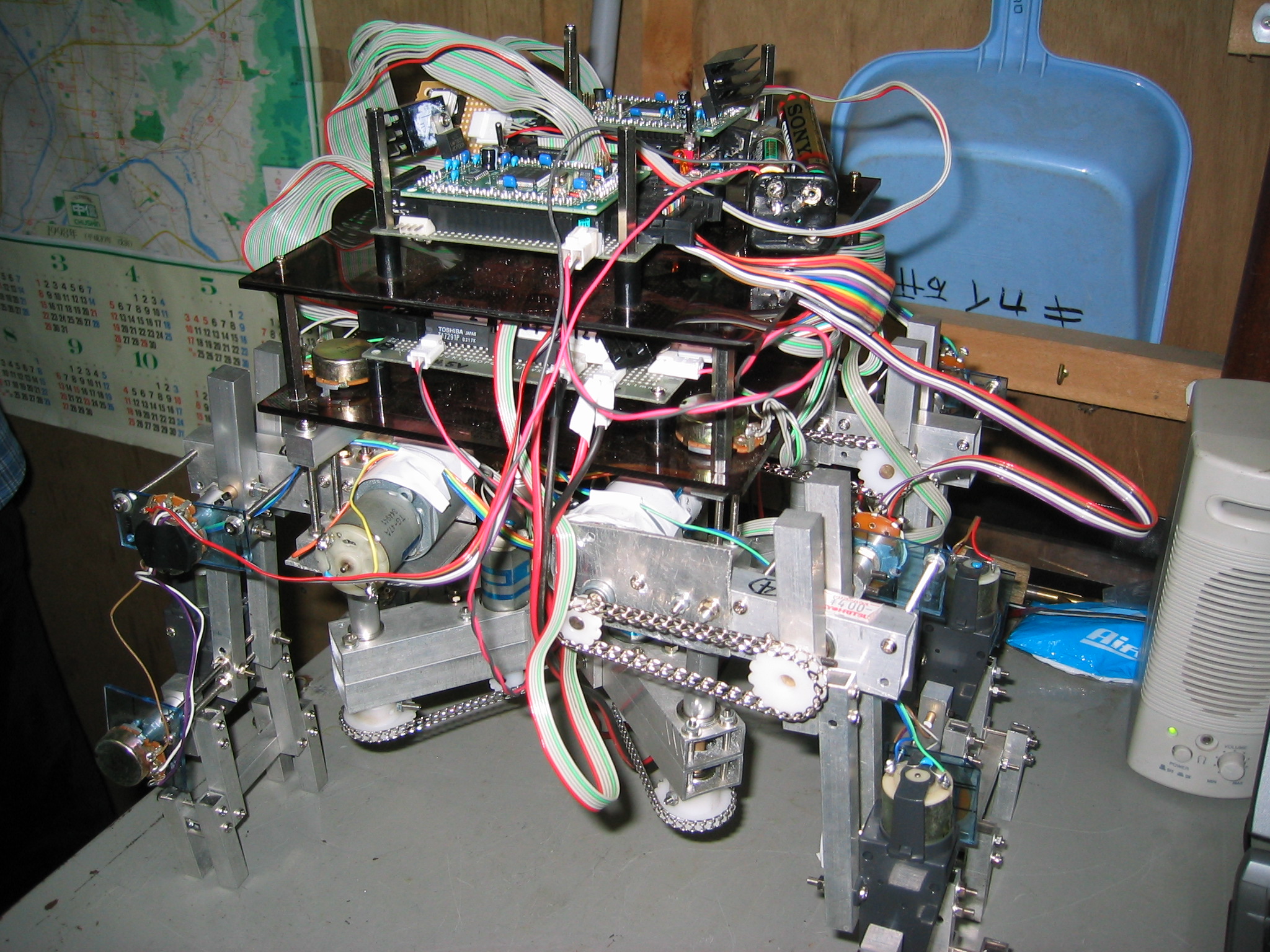
Single-robot L:440mm * W:380mm * H:500mm, 4kg, 10mm/s Distance sensor, Hand, Appeals: ボールの落ちているエリアへのショートカットのため、真ん中にある段差を乗り越える予定…。 サーボを使用せずに作り上げました。 H8を2台のせ、互いに通信しあいながら制御します。 Characteristics: 本体から生えた4つの足がそれぞれ独立に動作することによって歩き、進んでいきます。 ボールの落ちているエリアまで到達すると、足についた距離センサによってボールとの距離をはかり、足先についたハンドによってボールをとり、ゴールへと運びます。 |