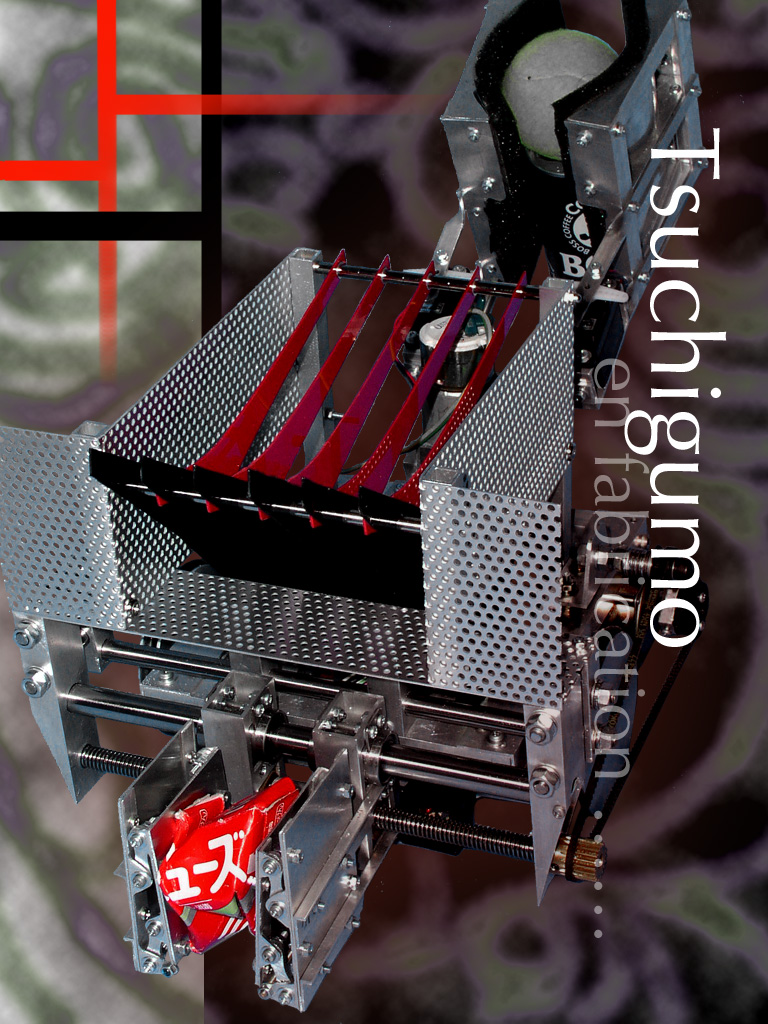
| 自立型,単独型 長380mm×幅280mm×高250mm, 重6.5kg, 速800mm/s 距離センサ, 光センサ, ハンド, アピール 機構的な工夫は制御を軽減できるということを実証したいです。 ロボットの特徴 私たちの土雲はGreifer(T10)とは違った,新たなハンドを提案します。私たちのマシンについているハンドは台形リンクと直動機構を用いてたった一つのモーターで,対象物の捕獲,持ち上げ,保持を行うことができます。また,直動機構に台形ねじを使うことで,ハンドの作動における安定性を増しています。また,このハンドはDCモーターを使いますが,制御はほとんどいりません。 |