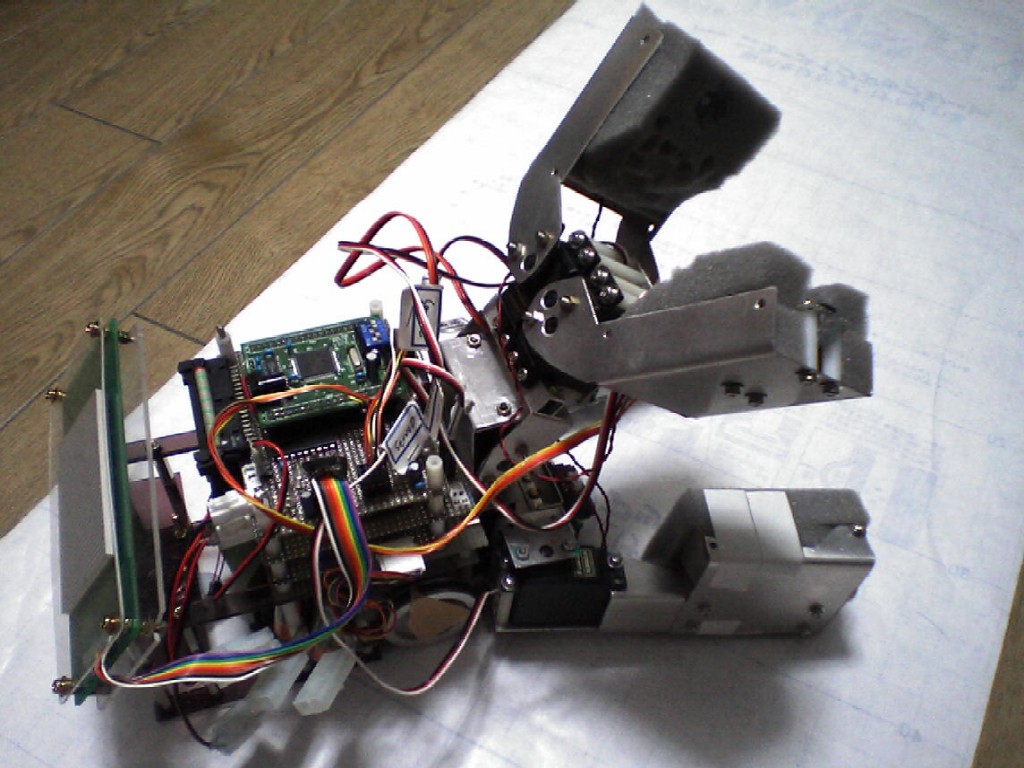
| 自立型,単独型 長330mm×幅160mm×高220mm, 重1.5kg, 速1000mm/s ライントレース, 距離センサ, ビジョンセンサ, 光センサ, ハンド, アピール 二つのアームを使った効率的な対象の処理(タワーの同時搬送等)を行います。 By two arms,handle objects efficiently(include conveying Tower at once). ロボットの特徴 昇圧回路によりステッピングモータに供給する電圧を24Vにして高速移動を狙っています。またデマルチプレクサの使用により1つのPWM信号線により6つのRCサーボを同時に制御しています。カメラ(Treva)を使用し石鹸箱に書かれた文字を認識します。 To move quickly,supply 24V to stepping motor by using step-up-regulator. Control 6 RC-ServoMotors by one PWM signal line by using de-multiplexer. Recognize alphabet A-B-C-D on the box by Camera-Unit Treva. |