| Self-content,
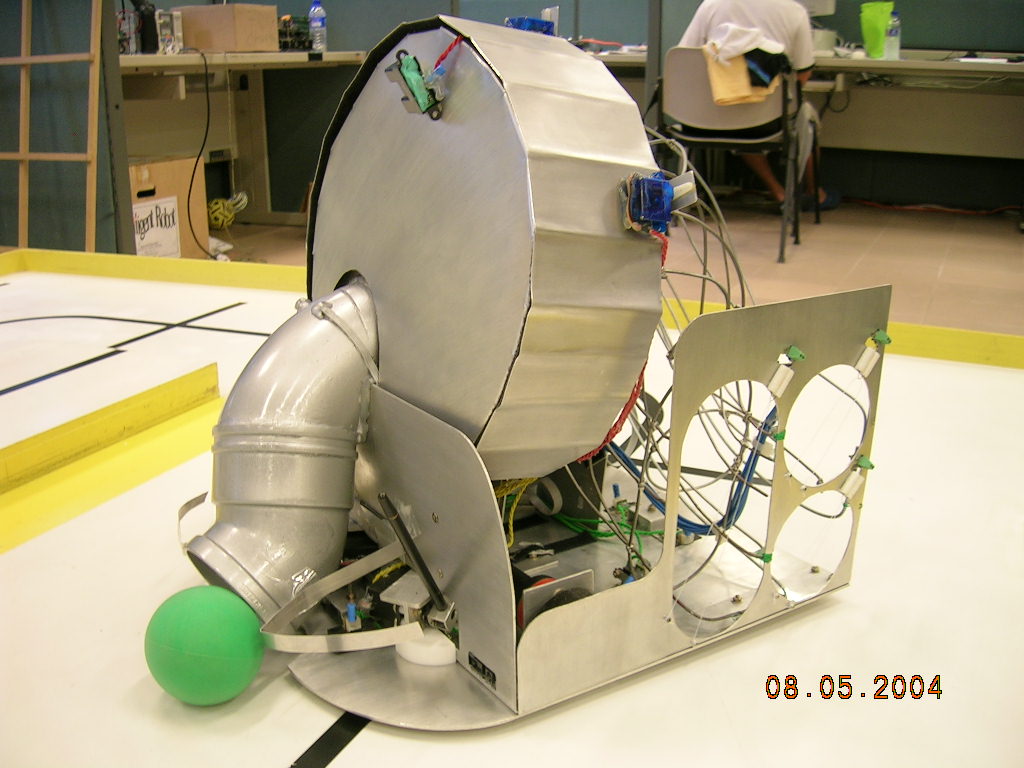
Single L:400mm * W:320mm * H:400mm, 5.3kg, 1200mm/s Line-trace, Dead-reconing, Distance sensor, Sensors using lightwave, Appeals: 1. The robot does not need to position itself accurately with respect to the balls to collect them thus saving time. 2. The robot performs parallel multi-tasking i.e. moving and collecting balls while performing color detection and sorting in the background. 3. The use of an off-the-shelf handheld vaccum cleaner pump for ball-collection and the use of a current-carrying fuse wire to burn a thread for ball release are simple yet effective mechanisms. Characteristics: The sole autonomous robot employs differential wheel drive for motion. It has 2 "feelers" to trap the balls as it moves forward. The vacuum suction is used to draw the balls near the robot's "mouth" into the chambers of a rotary drum where color detection and sorting is carried out and the colored balls are then stored in the respective wire frame cages. |