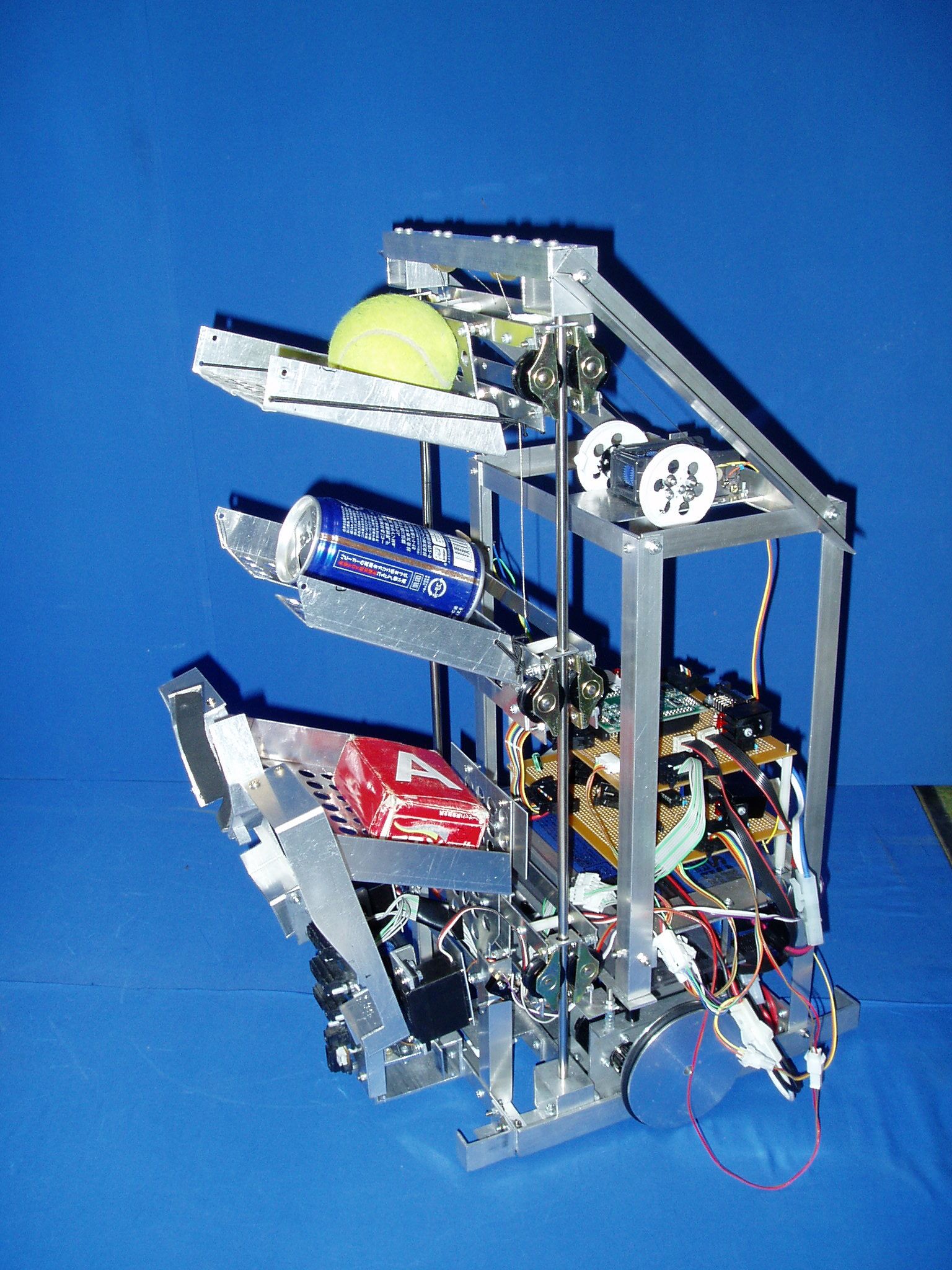
| 自立型,単独型 長300mm×幅220mm×高860mm, 重6kg, 速800mm/s デッドレコニング, 距離センサ, ハンド, アピール 対象物をゴールに入れるときに、リフトをアームとリフト用の モータを合わせて使うことにより、確実な得点が可能なことです。 ロボットの特徴 動きは座標計算とフォトリフレクタによる補正で動きます。 対象物は四つのPSDでどのセンサが反応しているかで種類と距離を判定します。 ハンドで捕獲し、リフトに乗せる動作を3回繰り返し、 その後順番にゴールにリフトを傾けて入れていきます。 |