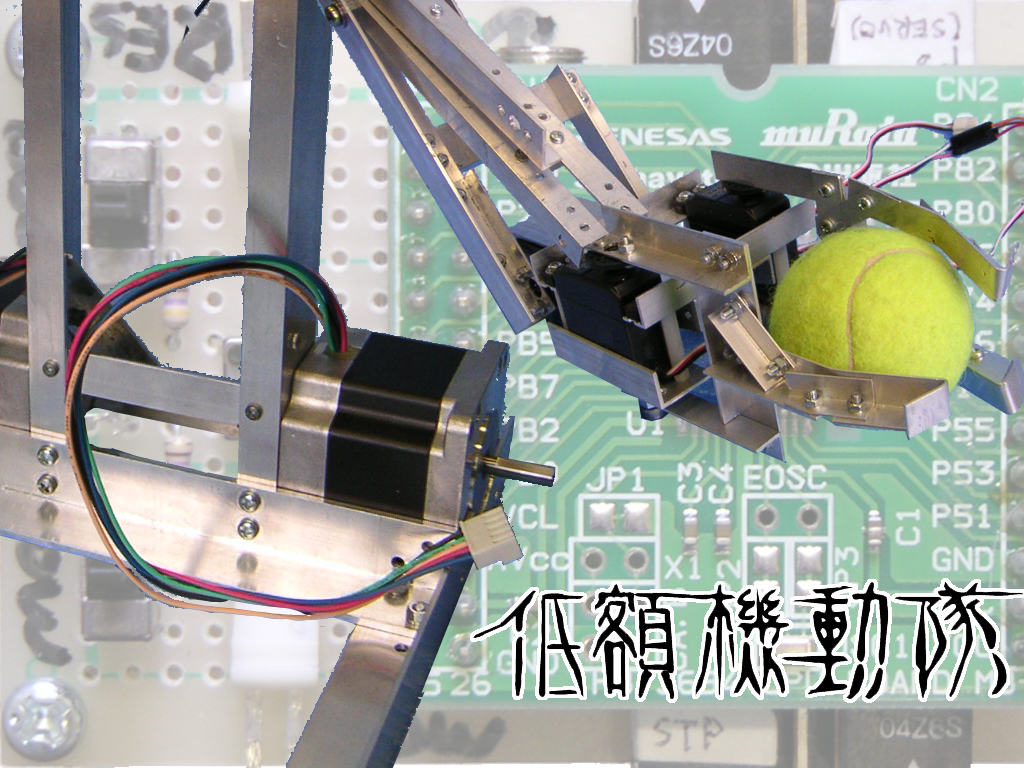
| 自立型,単独型 長200mm×幅350mm×高450mm, 重6kg, 速---mm/s ライントレース, デッドレコニング, 距離センサ, ハンド, アピール 人型です。 片手で物を掴めます。 前傾姿勢を取って走ります。決して歩きません。 He is a kind of humanoid. He can hold objects with his right-hand only. He runs in a forward-bent posture. Never walks. ロボットの特徴 ・5相ステッピングモータとライン検出を用いた、スムーズな移動 ・機体各所にDCモータとラジコンサーボを搭載し、柔軟な姿勢を実現 ・制御にはH8/3694(Tiny)を2台使用。シリアル通信を用いた処理の分散 Mobility : 5-phase stepping motor , line sensor. Controller : 2x H8/3694(Tiny) micro controller w/ serial communication. Many motors loaded to posing |