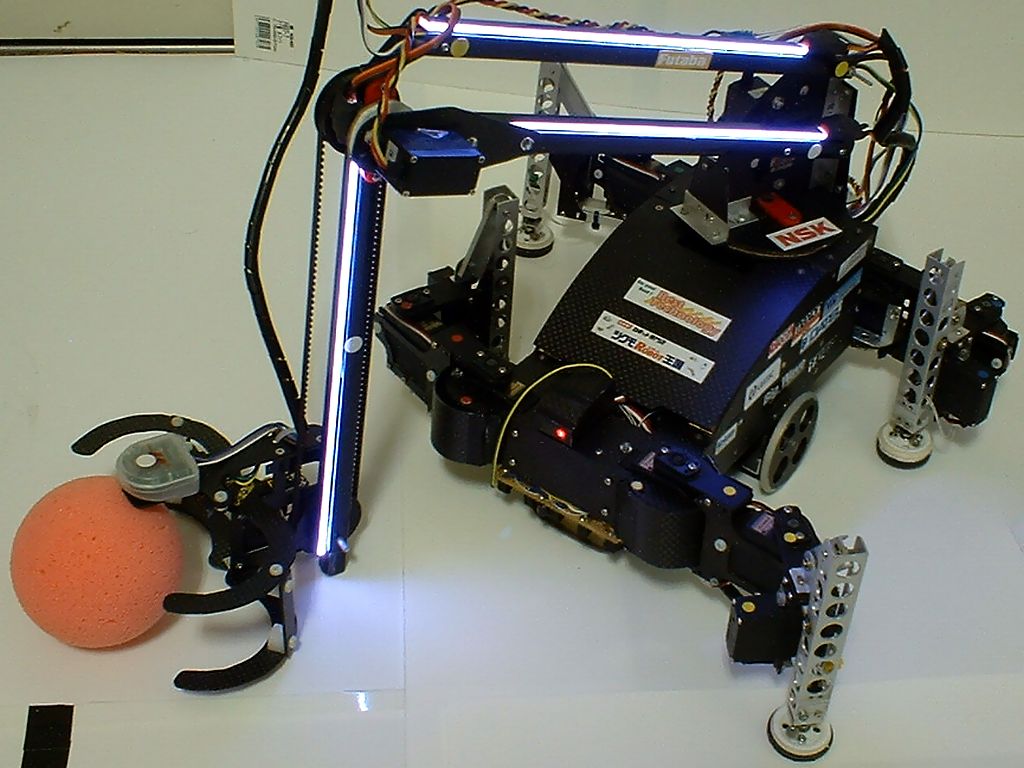
| Self-content,
Single-robot L:450mm * W:400mm * H:300mm, 1.7kg, 1200mm/s Line-trace, Dead-reconing, Distance sensor, Vision sensor, Sensors using lightwave, Hand, Appeals: 去年初めて出場し,「ロボット学会賞」を頂いたマシンを改良しました. この大会のために新規に製作したアームは3自由度しかありませんが,4節平行リンクとタイミングベルトの組み合わせにより,ハンドに取り付けられたカメラが常に真下を向くよう設計されています.これによって画像中の1pixelと実際の距離が簡単な比例関係になるため,画像処理の負荷を大幅に減らすことができました.また,独自の画像認識アルゴリズムは画面内に対象物が複数あっても,それらすべてのXY位置データを高速かつ正確に計算し最もつかみやすいボールを選び出します. Characteristics: 脚,車輪,アームを組み合わせていろいろな動きができる.アーム先端にはCMOSカメラが取り付けられている.これで上空から競技台を見下ろし,画像認識によりボールの位置と色を判別し的確にハンドリングできる. 全18軸と各種センサの制御のためマイコンを5個搭載し,高速シリアル通信で並列分散処理している.メインCPUはSH2(49MHz)を使用し,脚,アームの位置の逆運動学計算や車輪目標軌道として3次スプライン軌道の生成をリアルタイムで行うことができる. |