| Self-content,
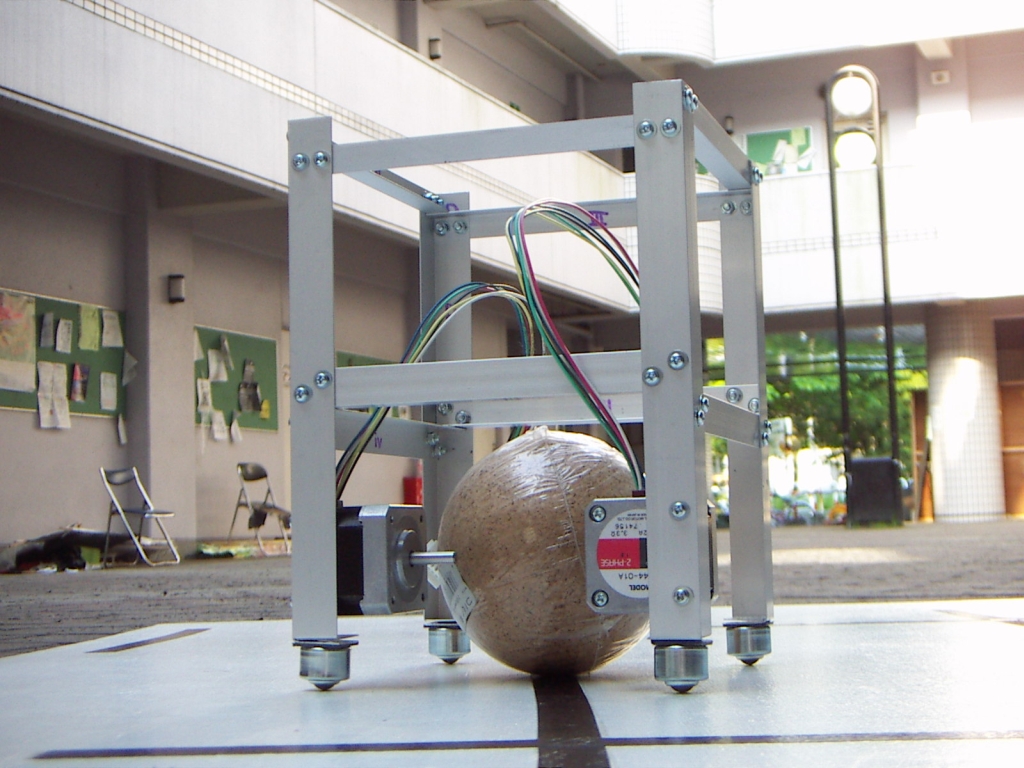
Single-robot L:160mm * W:160mm * H:260mm, 2kg, ---mm/s Vision sensor, Sensors using lightwave, Hand, Characteristics: 「箱」は球体を2つのモーターで回転させることによって移動します。 その方式はコンピュータのマウスの逆、軸を回転させて球体を駆動するものです。 モーターの回転数を変えることによって全方向に移動することが可能です。 機体を回転させることはできないので、カメラとハンドが360度回転するような仕組みにしました。 カメラ以外のセンサーはカメラの位置を初期化するフォトインタラプタのみで ラインの読み取り、対象物の判別はすべてカメラで取得した画像を解析することにより行います。 |