| Self-content,
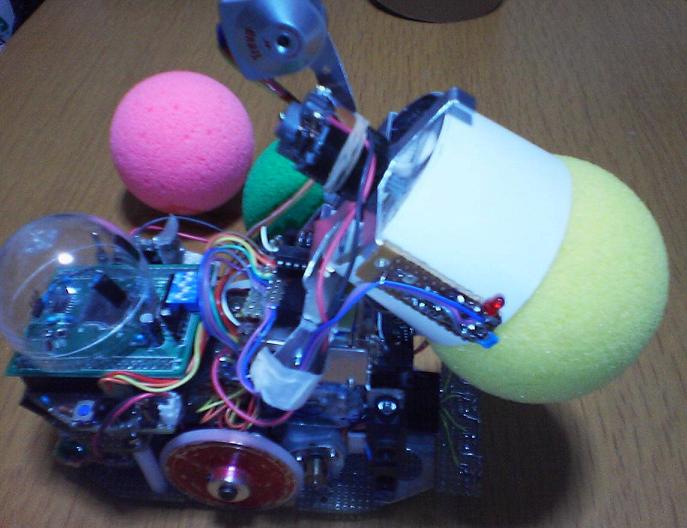
Single-robot L:150mm * W:80mm * H:160mm, 0.60kg, 1200mm/s Line-trace, Dead-reconing, Distance sensor, Vision sensor, Wind, Appeals: ボール同士が接近していても引っかかったりすることのないようにするため、ファンで吸引する方法を採用しました。 ファンの吸引力は、モーターと蓄電池の変更で前回より強力になっています。 画像処理技術を用いて段差越えシュートに挑戦します。 Grabbing with a fingered robot hand may be troubled by other balls or wall. So I chose the simplest and assured way. Long shoots are accomprished with help of the vision sensor. Characteristics: 足回りは2個のDCモーターとロータリーエンコーダーで構成されています。 4個のアナログ式ガイドラインセンサーを用いて高速に走行します。 アームの先のプロペラファンでボールを吸い付けて運びます。 ボールを落とす際にボールが機体前方のバンパー(ラインセンサー)に当たって跳ね返るのを利用して遠くまでボールを転がしてシュートします。また、アームの振りでボールを投げることもできます。 CMOSカメラ(Treva)でボールの色を判別します。また、段差を越えてボールをシュートする際の照準合わせにも用います。床のラインを画像から検出してボールを投げる方向を調整します。 This robot moves with 2 wheels, driven by independent DC motors and encoders. 4 analog guide-line sensors are used. To search balls, 3 PSD distance sensors are used. To catch balls, a propeller fan is used. The robot can shoot a ball; rolls a ball to a long distance, using potential energy and bounce of the ball itself. The robot can also throw a ball by swinging its arm. CMOS camera (Treva) is used for discremenating color of balls and detecting the goal when the robot shoots a ball over the centre step; floor mark in front of the goal is detected from the camera image. |