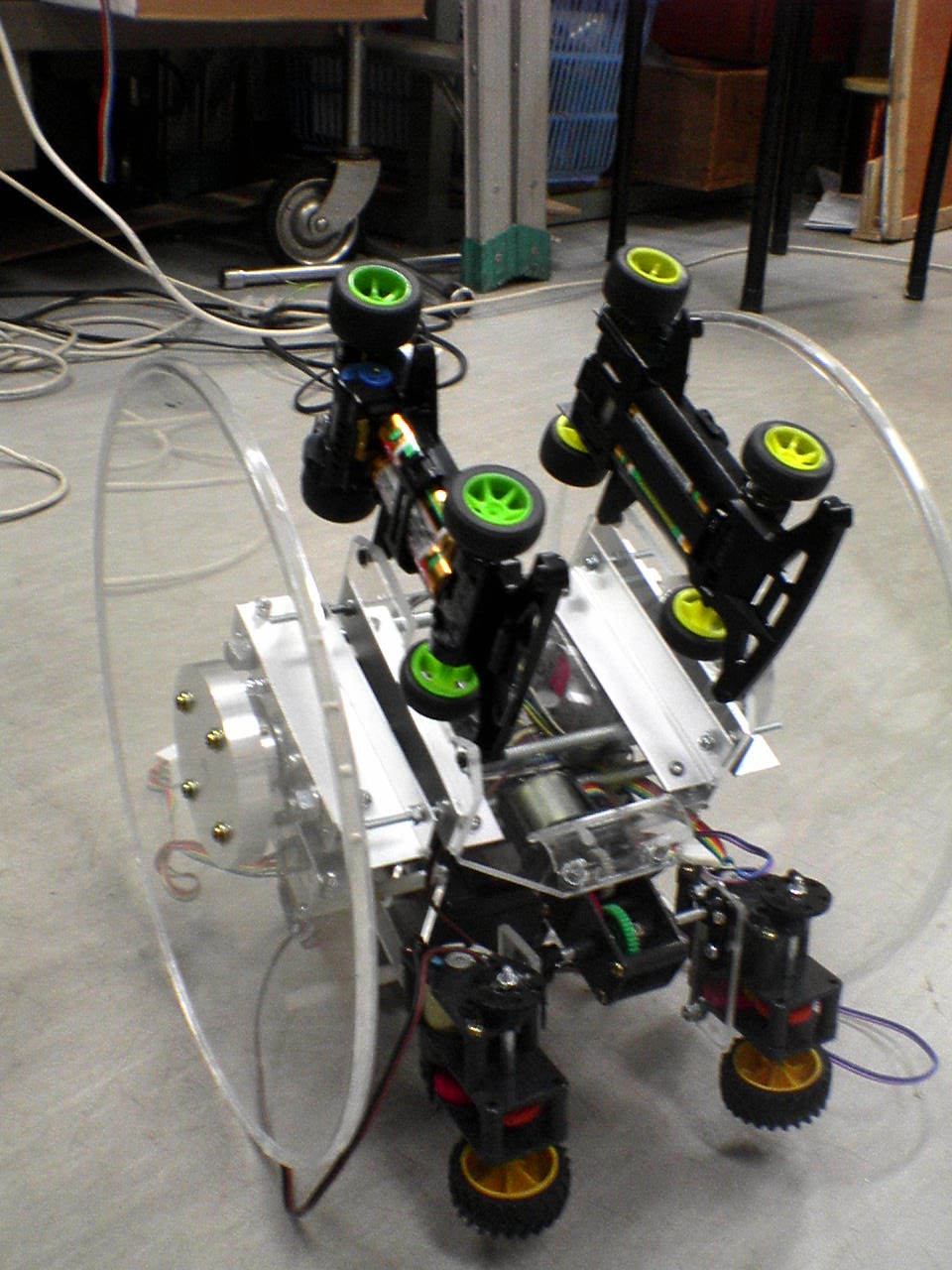
| Self-content,
Single-robot L:250mm * W:205mm * H:250mm, ---kg, ---mm/s Distance sensor, Sensors using lightwave, Hand, Appeals: スケルトンな筐体。あえてボールを飛ばしてゴールを試みます。 Characteristics: 二輪のみで接地するディファレンシャルドライブです。バッテリや回路類は車輪の径の中に収めます。触覚やハンドが多少はみ出しているかもしれません。ボールの探索はPSDで、判別は色センサで行い、ハンドでボールを捕獲します。 |