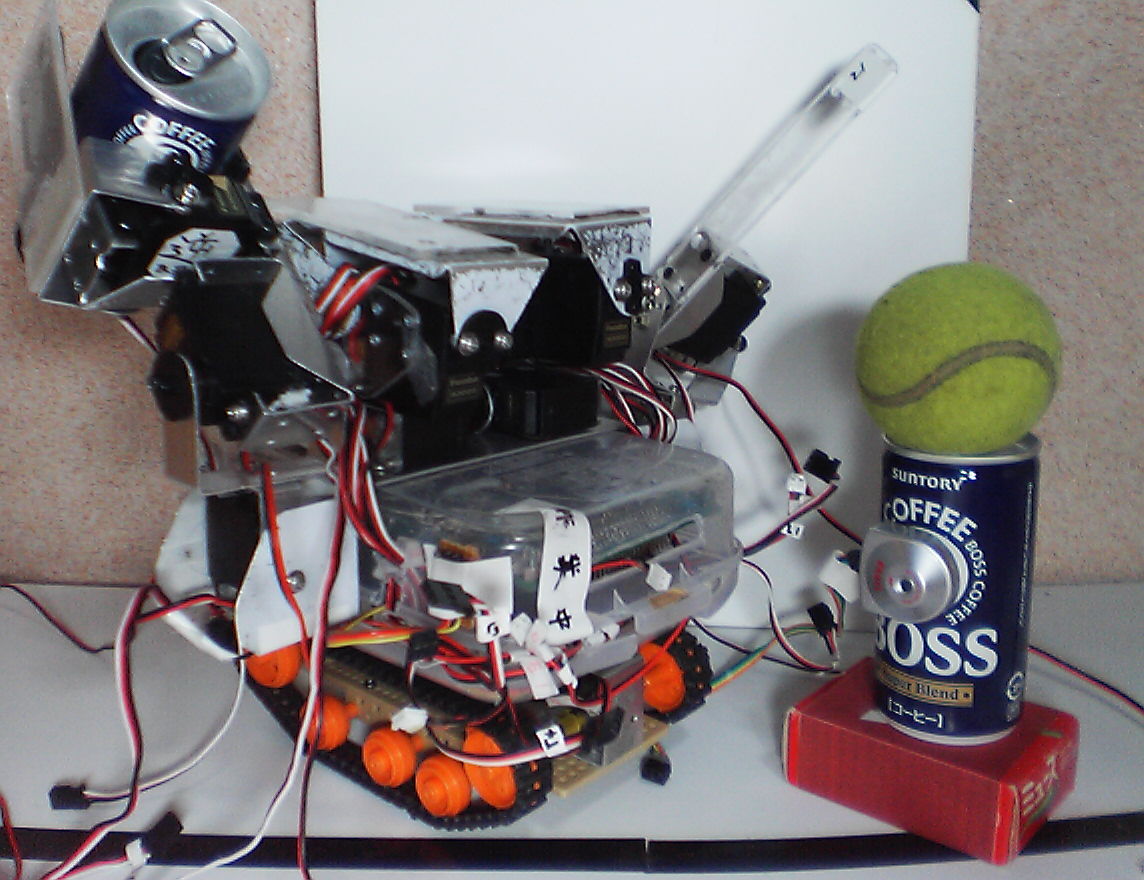
| 自立型,単独型 長200mm×幅250mm×高350mm, 重1.8kg, 速100mm/s ライントレース, 距離センサ, ビジョンセンサ, ハンド, アピール 2005年大会・日本ロボット学会会長賞として頂いたSH-4 CPUボードを使用しております。 ロボットの特徴 2脚ロボットの上部にクローラが逆さまに載った形状をしています。腕を用いて自ら転がって2脚とクローラを使い分けます。 対象物を扱う腕部は2脚とクローラのいずれの状態でも使用可能です。 脚及び腕部の関節にはラジコン用サーボモーターの機構部及びポテンショメータを利用しています。 CPUにはSH-4を使用し、全関節のディジタルPID制御を含むすべての処理を行っています。 |