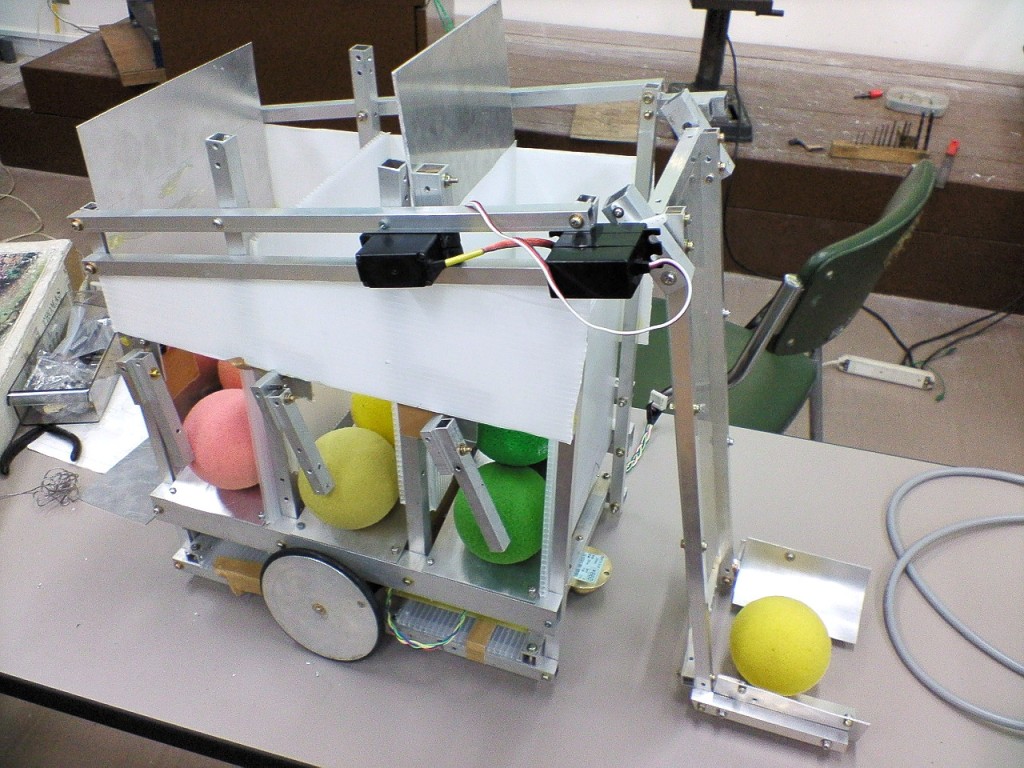
| 自立型,単独型 長300mm×幅120mm×高250mm, 重5kg, 速50mm/s ライントレース, 距離センサ, ハンド, アピール その巨大な牙は重さにして5トン以上の岩石を持ち上げ、優雅かつ大胆な鼻と背中で岩石を運び、直線美溢れる四本の「足」で目的地へと果敢に向かう。 I Manks make the huge tusk weight and lift a rock more than 5t and carry the rock with beautiful nose and bold back.He goes to the destination daringly with the splended feet with curve line . ロボットの特徴 距離センサーと識別センサーを用いて玉を仕分ける標準的なロボット。アームはいわゆる「塵取り式」でモーターは使用していない。 The standard robot which assorts a ball with a distance sensor and an identification sensor. An arm does not use a motor with so-called "collecting garbage type". |