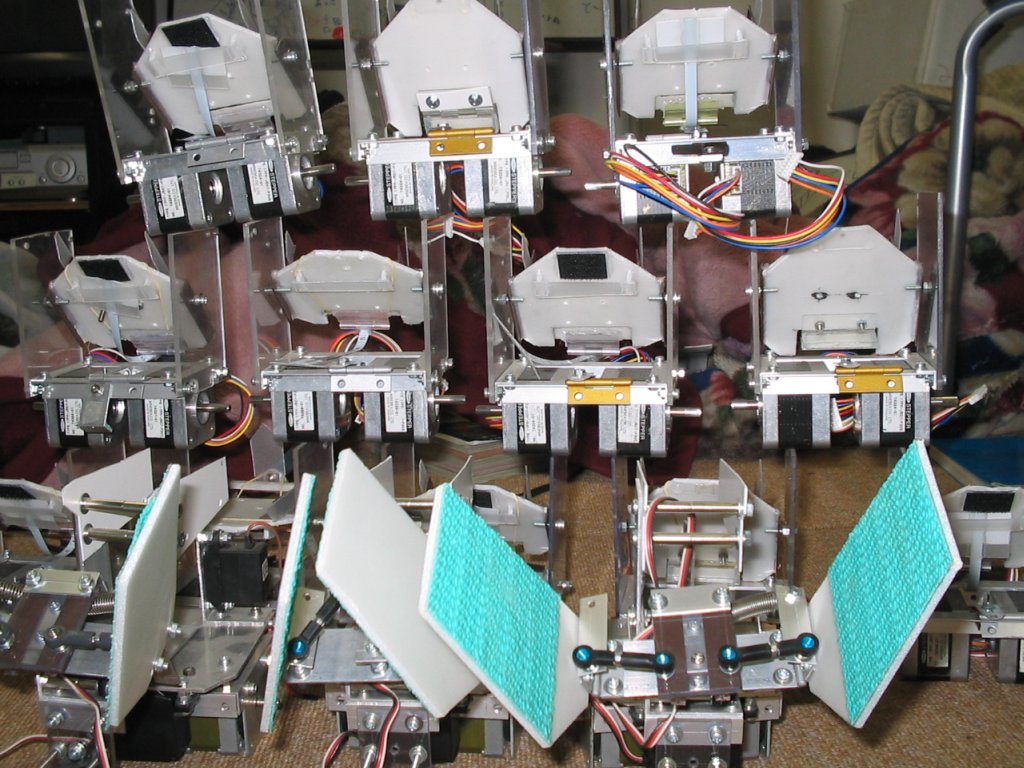
| 自立型,分離合体型 長150mm×幅130mm×高200mm, 重0.9kg, 速150mm/s ライントレース, デッドレコニング, 距離センサ, 光センサ, 協調動作, ハンド, アピール 移動用モータ以外のアクチュエータを積んでいるのは先頭のロボットのみで、後ろのロボットへのボールの送り、最後尾ロボットの分離、ボールの排出も機構的に行います。 Only a leading robot have actuators excepts moters for moving, so other robots are "moving" only. They pass the ball, apart from array, and throw out the ball with mechanistic system only. ロボットの特徴 15機のロボットが6機・6機・3機の編成でボールを取りに行きます。先頭のロボットがボールを取り、後ろに送り、最後尾のロボットが分離してボールを捨てに行きます。 Fifteen robots get the balls in the tri-parted group of 6, 6, 3 each. Three leading robots catch the ball and hand over it to following robots. When the ball is at the last robot, it aparts from the array of robots and moves to the goul to throw out the ball. |