| Self-content,
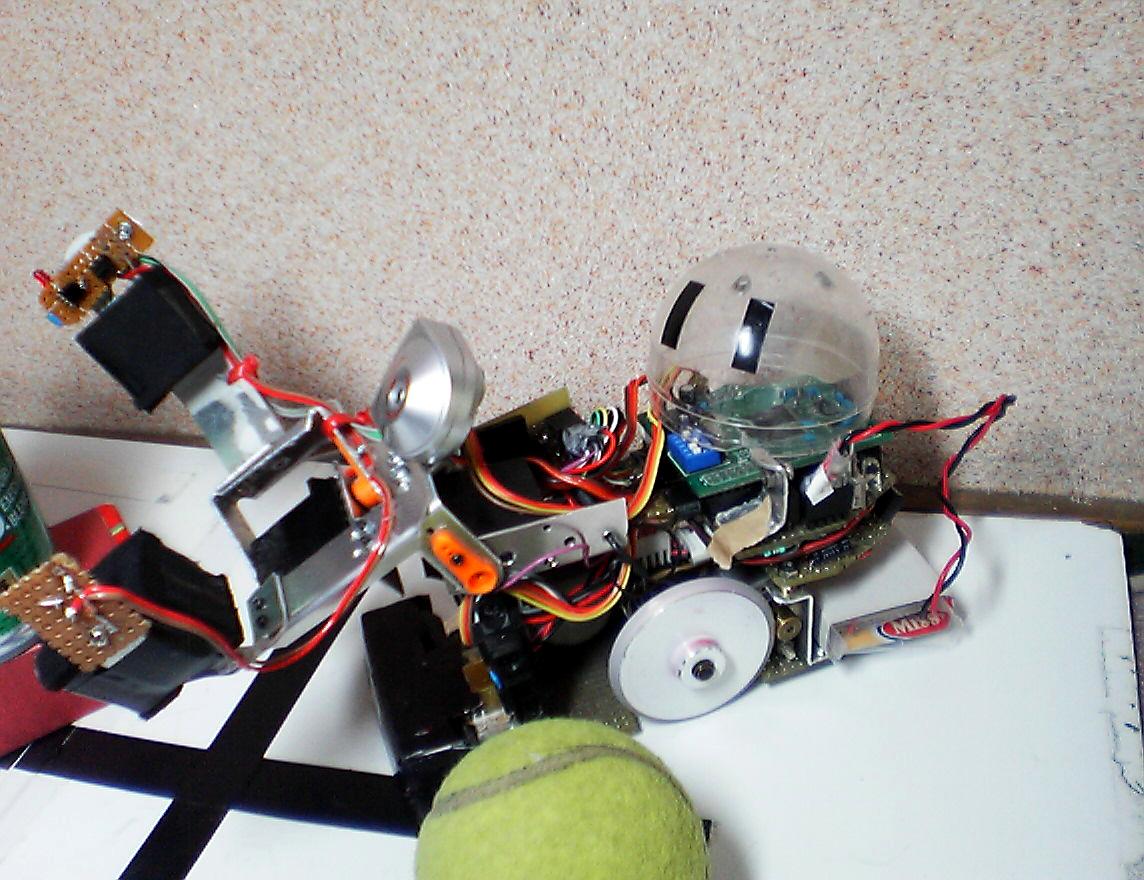
Single-robot L:160mm * W:80mm * H:180mm, 0.6kg, 1000mm/s Line-trace, Dead-reconing, Distance sensor, Vision sensor, Sensors using lightwave, Hand, Appeals: 2005年チャレンジコースに出場した風兎2005の足回り、制御回路、走行プログラムの一部を再利用しています。元々移動機構の実験用として作られた汎用的ロボットなのですが、ハンドリング機構とプログラムの変更によって様々なタスクが行えることを示したいと思います。 平均的参加ロボットよりも小さく、軽いロボットです。コンテストに最適なサイズはもう少し大きいところにあると思われますが、あえて小さくすることに挑戦しています。 対象物は1個ずつしか運べませんが、足の速さで1個をゴールするまでの時間を短縮して大量得点を狙います。 Characteristics: 3個のPSD距離センサーで対象物を探し、ハンドで把持して運びます。 手先の透過型フォトインタラプタで対象物の高さを測り、種類を見分けます。 積み重ね対象物(タワー)は最初に缶を取ります。上のボールは飛んで転がっていきますが、後で発見して回収します。 ライントレース時にはラインに沿って走った距離を把握しています。記憶されている競技台マップと照合することで、交差点があるはずのない場所での誤検出を回避します。また、曲がり角では減速します。 ガイドラインセンサーにはアナログ式を採用し、たった4個のセンサーしかないにも関わらず高速できめ細かいライントレース制御を実現しています。 段差の反対側からボールを投げます。初めに色つき円筒をゴール隣に設置し、これを目印に狙いを定めます。 |