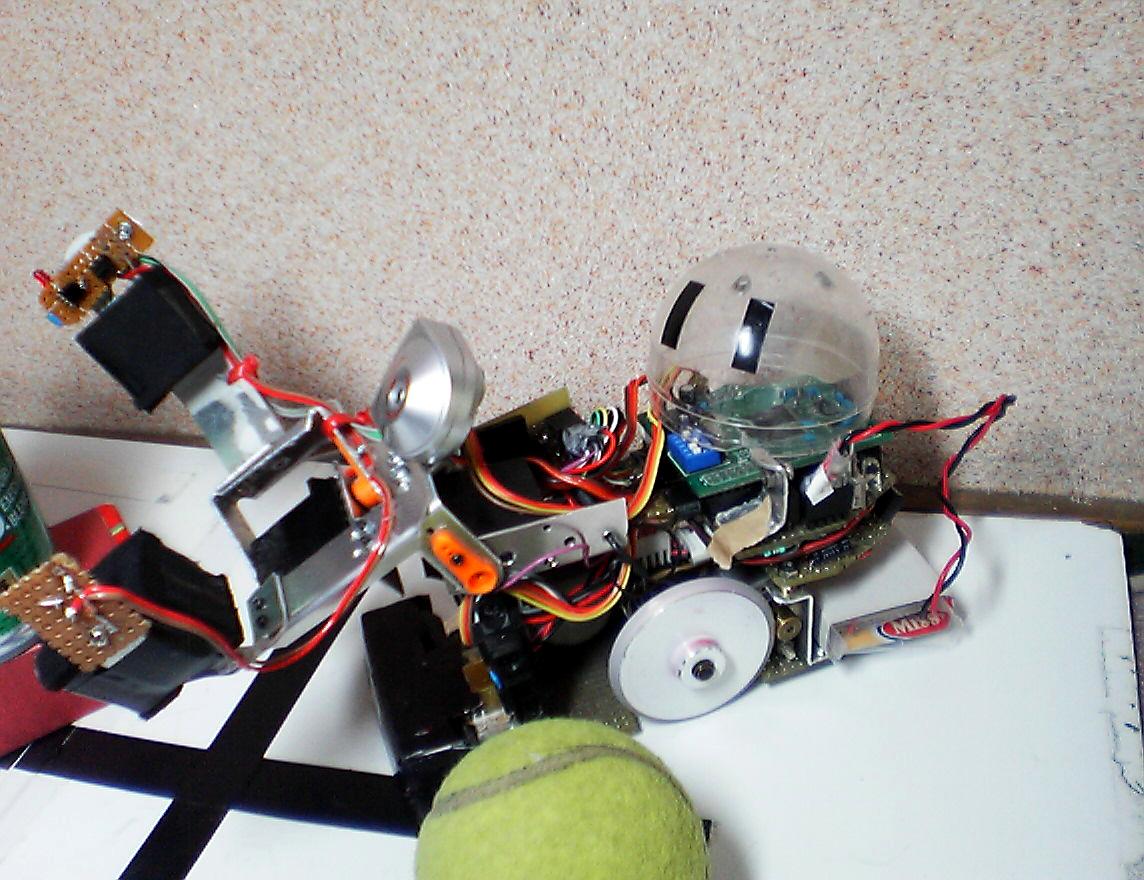
| 极惟房,帽迫房 墓160mm∵升80mm∵光180mm, 脚0.6kg, 庐1000mm/s ライントレ〖ス, デッドレコニング, 调违センサ, ビジョンセンサ, 各センサ, ハンド, アピ〖ル 2005钳チャレンジコ〖スに叫眷した慎牌2005の颅搀り、扩告搀烯、瘤乖プログラムの办婶を浩网脱しています。傅」败瓢怠菇の悸赋脱として侯られた绕脱弄ロボットなのですが、ハンドリング怠菇とプログラムの恃构によって屯」なタスクが乖えることを绩したいと蛔います。 士堆弄徊裁ロボットよりも井さく、汾いロボットです。コンテストに呵努なサイズはもう警し络きいところにあると蛔われますが、あえて井さくすることに末里しています。 滦据湿は1改ずつしか笨べませんが、颅の庐さで1改をゴ〖ルするまでの箕粗を没教して络翁评爬を晾います。 ロボットの泼魔 3改のPSD调违センサ〖で滦据湿を玫し、ハンドで悄积して笨びます。 缄黎の譬册房フォトインタラプタで滦据湿の光さを卢り、硷梧を斧尸けます。 姥み脚ね滦据湿(タワ〖)は呵介に刺を艰ります。惧のボ〖ルは若んで啪がっていきますが、稿で券斧して搀箭します。 ライントレ〖ス箕にはラインに辫って瘤った调违を悄爱しています。淡脖されている顶祷骆マップと救圭することで、蛤汗爬があるはずのない眷疥での疙浮叫を搀闰します。また、妒がり逞では负庐します。 ガイドラインセンサ〖にはアナログ及を何脱し、たった4改のセンサ〖しかないにも簇わらず光庐できめ嘿かいライントレ〖ス扩告を悸附しています。 檬汗の瓤滦娄からボ〖ルを抨げます。介めに咖つき边披をゴ〖ル钨に肋弥し、これを誊磅に晾いを年めます。 |