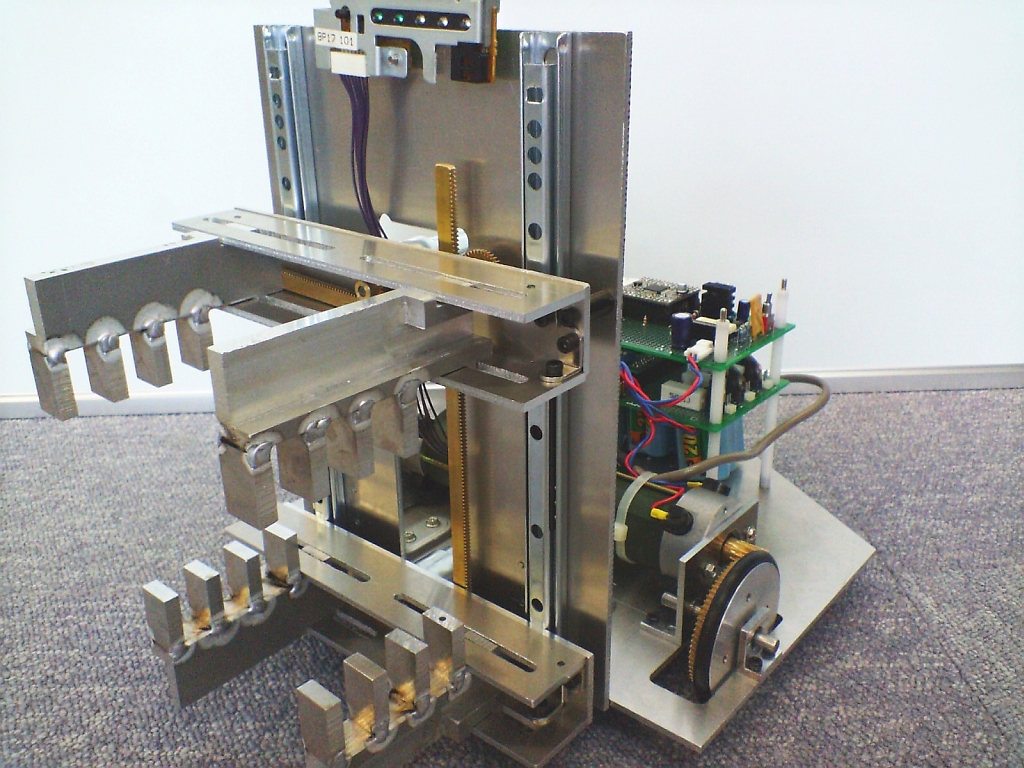
| 自立型,単独型 長340mm×幅260mm×高270mm, 重5kg, 速500mm/s ライントレース, デッドレコニング, 距離センサ, ハンド, アピール メインのマイコンのほかに足回りのモータを制御するためのマイコンを別に用意し,高精度な車体運動の制御を目指します.ハンドの形状を工夫し,上下どちらのハンドも対象物の重心を捉えられるようにしています. Rappy has an extra microcomputer to control motors in driving unit, to realize a precise control of his driving path. His hand has an unique shape which is designed to make both two hands catch the centre of mass of objects. ロボットの特徴 マシンの前面にハンドを2つ備えています.下側のハンドは上下可能ですが,上側のハンドは高さ固定とし機構の簡略化を図っています.タワーは上下のハンドを同時に用いて一気取りを狙います.単品の対象物は2個ずつゴールへ運びます.1つ目を下側ハンドで掴んだ後に上側ハンドへ受け渡し,さらに2つ目を下側ハンドで掴みます. Rappy has two hands on his front side. While the lower hand can move in vertical direction, the upper hand is fixed to his body in hopes of simplifying mechanism. He catches & carries all elements of a tower with his two hands at the same time. Single-arranged objects are carried two by two; i.e. Rappy catches first object by lower hand and gives it away to upper hand. Then he catches second object by lower hand. |