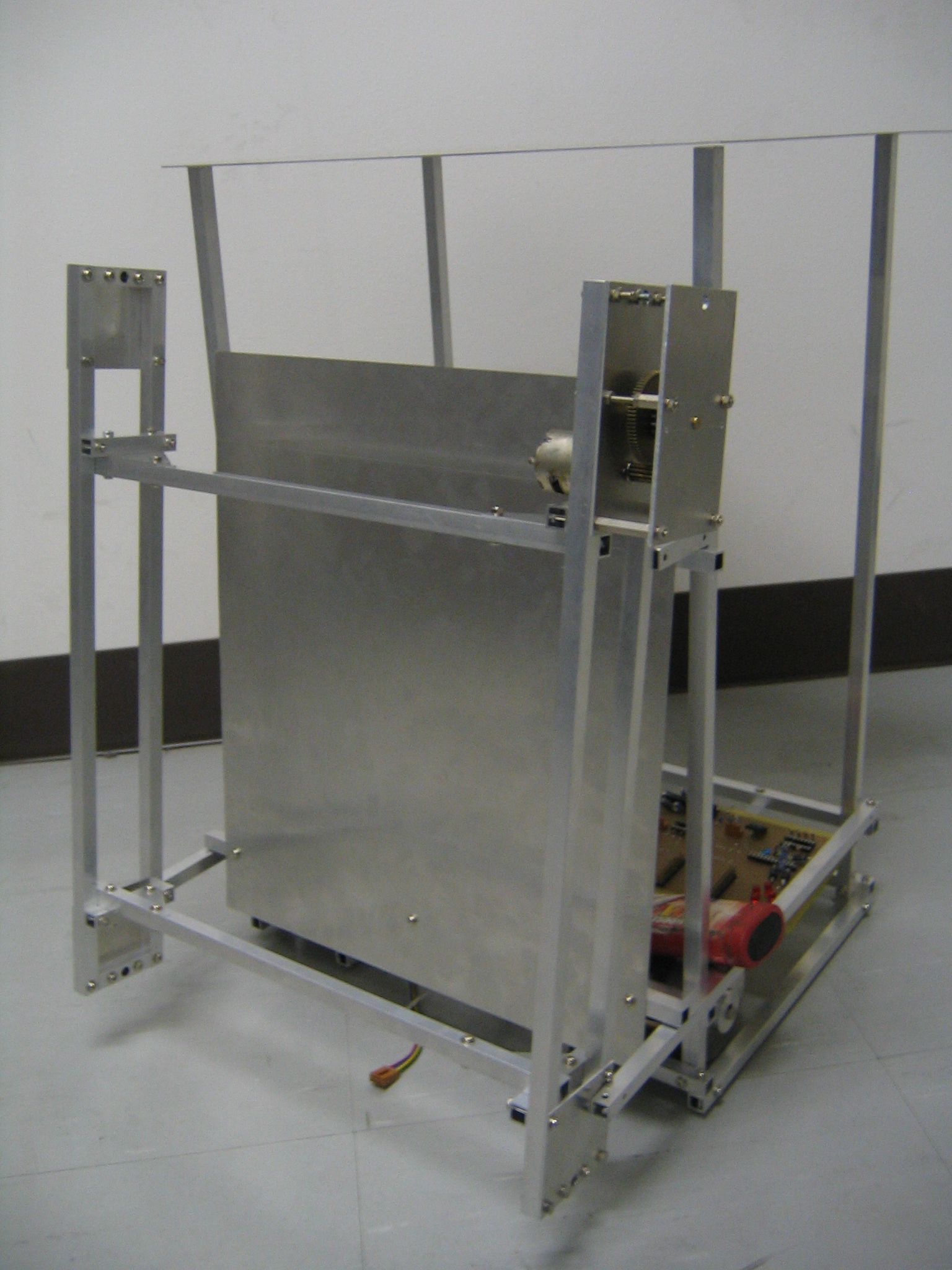
| 自立型,単独型 長500mm×幅350mm×高550mm, 重未定kg, 速未定mm/s ライントレース, ローラ, アピール 僕たちは新入生で、はじめてのロボット製作でした。 We are first year students and This is First Robot!##Ex-- ロボットの特徴 基本は、スタンダードなアーム+ベルトコンベアによる取り込みですが、アームを上下左右の二軸可動にすることにより、一度ですべてのボールを取り込むことを目指しています。これにより、動作の簡略化が望め、取り込み動作時に線を見失うなどのトラブルを防ぎます。色の識別は、カラーセンサーにより行う予定です。 Our lobot is a standard type robot which use robot-arms and a belt conveir. But,his robot-arms can move up,down,left and right. Thus,he can collect all color balls one time. This advantage enables us to simplify operation and prevents this robot from accident(ex.sensors loses sight, fails in the turn etc...). We'll use color sensor to classify balls. Our lobot use |