| Self-content,
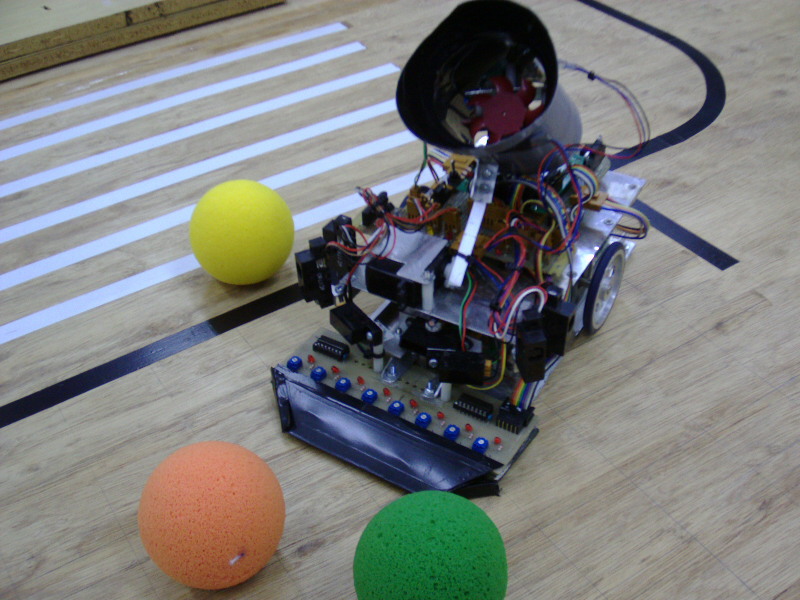
Single-robot L:268mm * W:143mm * H:215mm, 2.37kg, 300mm/s Line-trace, Distance sensor, Sensors using lightwave, Wind, Appeals: 昨年大会は非常に悔しい思いをして帰りました。 今年は絶対あきらめず、競技直前まで調整し、絶対目標クリアします。 Characteristics: 昨年大会では悔しい2次予選敗退でした。今年は決勝進出を目指しています。 ロボット動作は昨年同様「自立・単独型」で15個のボールを1個ずつ処理していきます。ロボットの走行速度を20%アップし、競技時間内に全てのボールが処理(完走)出来るよう改良しました。 昨年失敗したタイヤについては、昨年使用した硬質ゴムOリングから、シリコン性Oリングに変更しタイヤグリップを向上させました。 ボール取り込み機構については床のボールが隣接している場合を考え、を昨年の「ハンド」方式から「ファン(風)」方式に全面作り替えしました。 色センサについてはまだまだ識別率が悪い状態ですが、最後まであきらめずチャレンジしたいと思っています。 またパワーLEDやメロディICにも挑戦、「見てもらえるロボット」に少しでもなるよう頑張っています。 ソフトウェアの改良としては、ボールの捨て方に工夫、5種類のボール捨て方をプログラミングしました。ボールを拾った位置と色によって捨て方を替えます。 |