| Self-content,
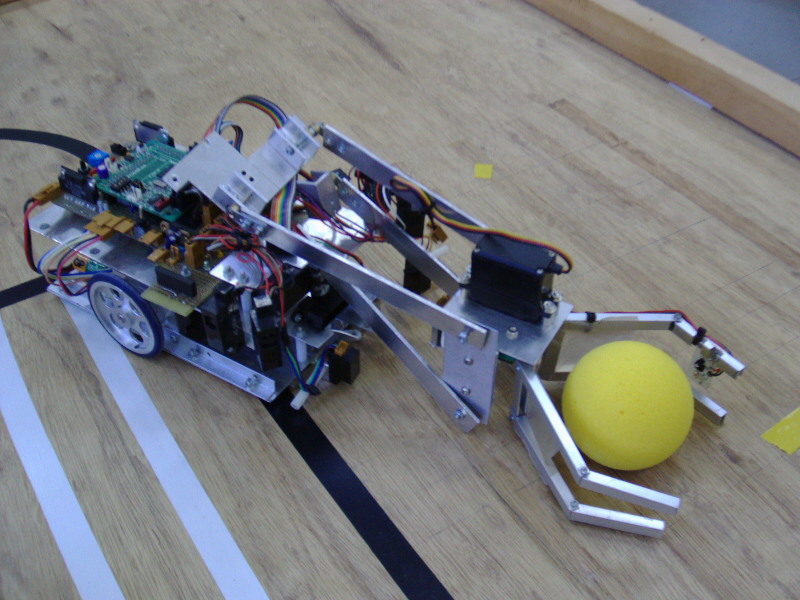
Single-robot L:260mm * W:145mm * H:300mm, 2.8kg, 200mm/s Line-trace, Distance sensor, Sensors using lightwave, Hand, Appeals: ボール取り込み機構としてラジコンサーボモータ2個によるアーム機構を自作しました。床のボールを拾い上げ、ゴミ箱まで運びます。従来はアームの先にハンドのついた単純機構でしたが、先輩よりリンク機構を指導してもらい製作しました。 色センサにも挑戦していますが、大会直前まで頑張ってみます。 Characteristics: 今回製作したロボットは、学校の授業を通し製作する「ステッピングモータを用いた基本台車」をベースに、ボール取り込み機構を自作して作りました。 ボールの処理は1個ずつです。競技時間内に15個のボールを処理できるよう、ギリギリまでロボットの走行速度を上げてみました。ボールを捨てる動作にバリエーションを持たせ、毎回異なった捨て方にチャレンジするつもりです。 |