korosuke
tyonbo's club
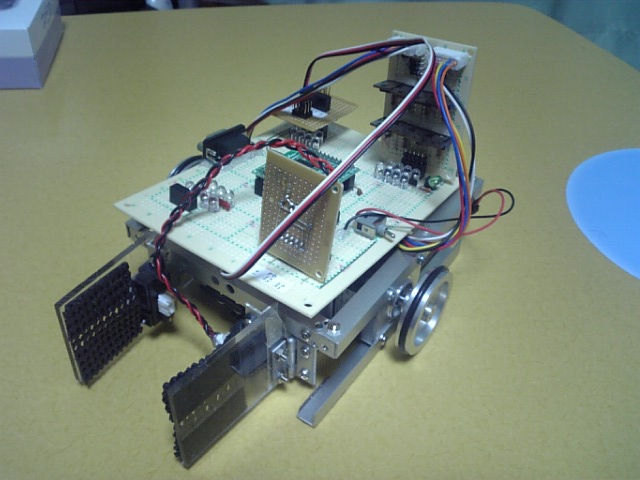 |
Self-content,
Single-robot
L:220mm * W:175mm * H:145mm,
1.5kg, 70mm/s
Dead-reconing,
Distance sensor,
Hand,
Appeals:
学生時代に1度出場しましたが、点数0で終了してしまいました・・・。
今回は社会人になって初出場となり、時間の制約を大きく受ける中での作成となったため機能を増やすことより確実に動くことを優先して作成しています。目指せ初得点!
Characteristics:
自マシン位置はコースの壁に接触することで位置を把握する方法を採用し、走行中はステッピングモータのステップ数で位置を把握しています。
ボールのキャッチとボールの位置確認はハンドとPSDを使用し、ボールとの距離を識別する方法を利用します。
| |
Results
1st Pre.round Game: 5, Judge: ---, Compensation: 0, Sum.:5.00
Performance: --- Challenge: --- Art:--- Speed :---
Revival Game: 12, Judge: ---, Compensation: 0, Sum.:12.00
Performance: --- Challenge: --- Art:--- Speed :---
2nd Pre.round Game: 0, Judge: 23.50, Compensation: 0, Sum.:23.50
Performance: 9.50 Challenge: 5.50 Art:4.50 Speed :4.00