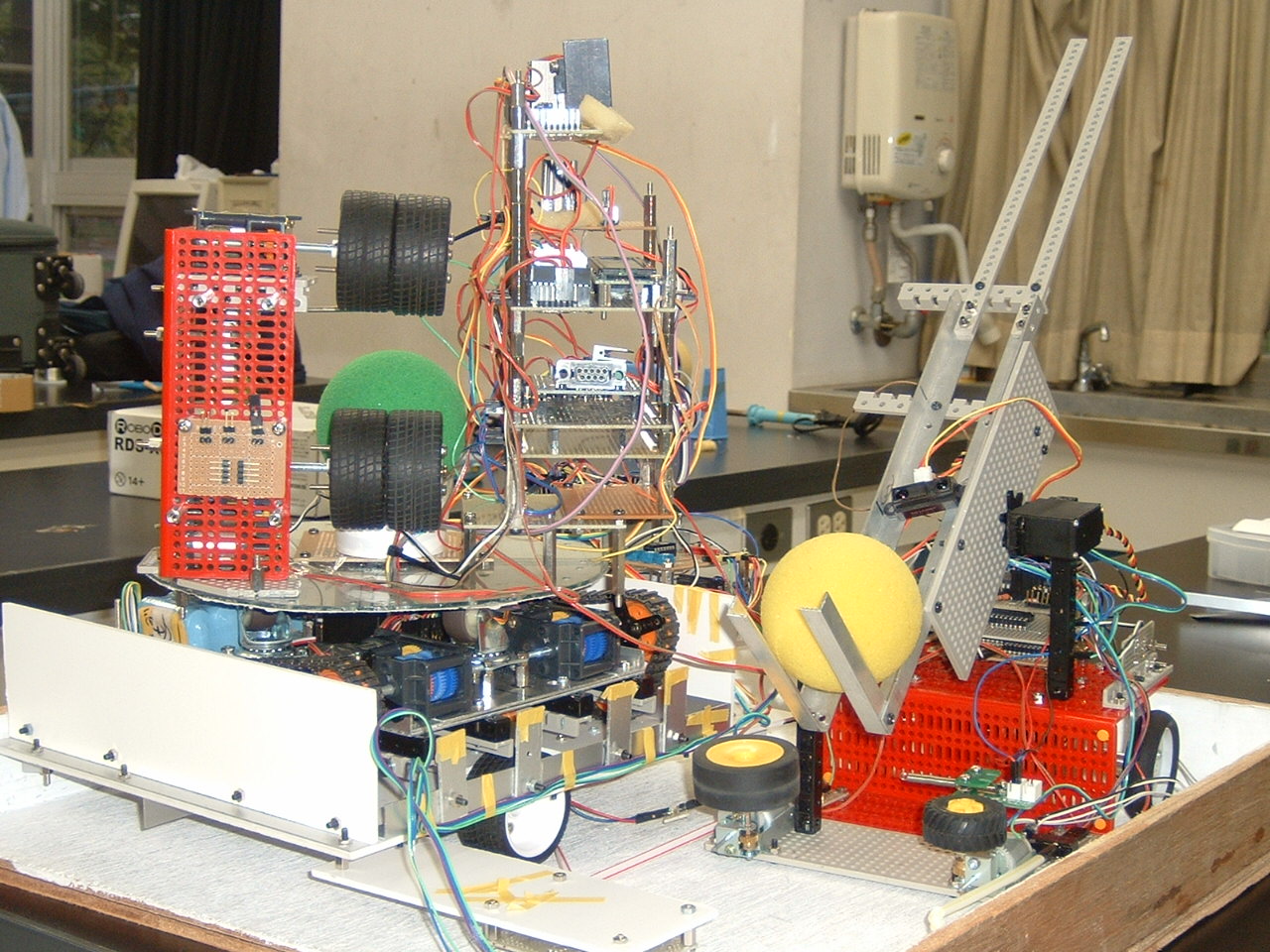
| 自立型,複数型 長450mm×幅450mm×高450mm, 重4kg, 速10mm/s ライントレース, 距離センサ, 光センサ, 音センサ, 風, アピール 三台のロボットの連携が売りです。昨年に比べると、技術がかなり向上しました。 運んで、掃除して、取って、流して、回って、飛ばします。 ロボットの特徴 三台のロボットが作業を分担して得点します。 ○黄昏 ・もらったボールの色分け、射撃を担当。 ・重いので運んでもらいます。 ・島に居座ります。 ・マイコンはSH−2 7144F。 ・使用モーターはDCモーターが5個、サーボモーターが1個。 ・センサ関連は、赤外線フォトリフレクタが3個、CDSが2個。 ・おそらく超音波送信側が付きます。 ・ノイズだすかもしれません。 ○サンダーバード5号 ・島の上に「黄昏」を輸送するのが第一目的です。 ・そのあと「アリ」のボール収集の手助けにいきます。 ・BASIC Stampを使っています。 ○アリ ・ボールを一つずつ、「黄昏」に渡します。 ・DC、ステッピング、サーボなどまんべんなく使用。 ・マイコンはPIC18F452を使用。 ・距離センサーで「黄昏」の位置を把握します。 |