| Self-content,
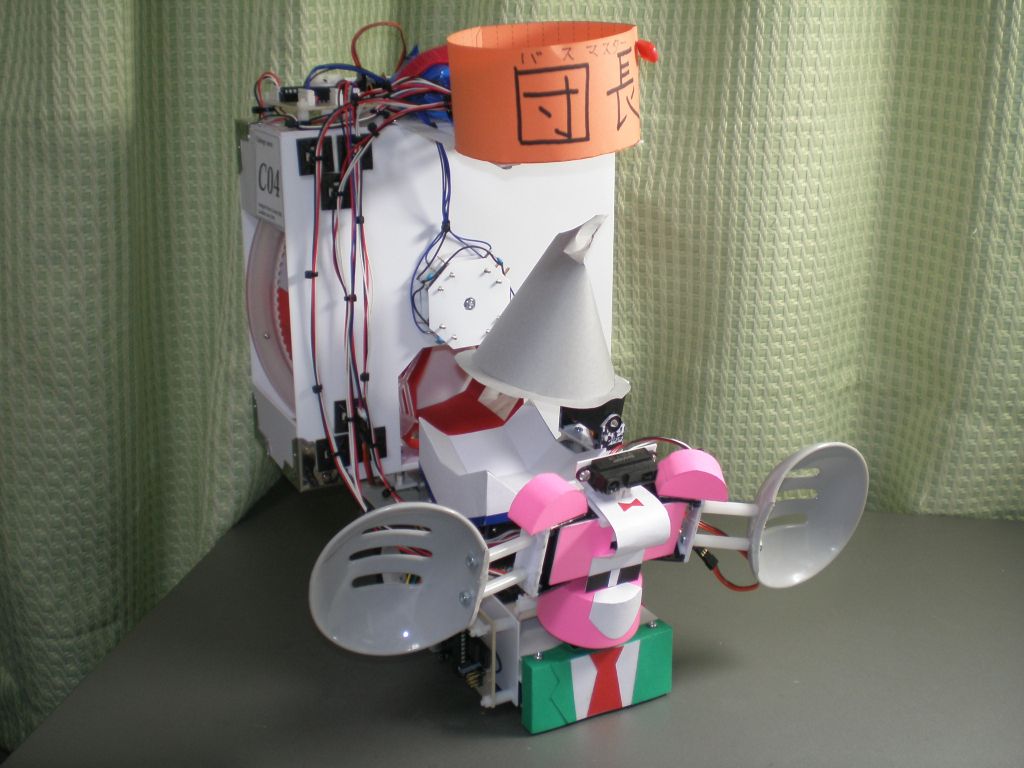
Single-robot L:350mm * W:200mm * H:280mm, 1.5kg, ---mm/s Line-trace, Dead-reconing, Distance sensor, Sensors using lightwave, Hand, Appeals: 各部にキャラクター性を持たせてメカ的に独立した構造を取っており、各部の動きによりボールがリレーされるように処理されていく。 アルミ材は使わず、プラ板、画用紙などを主な材料としている。全体として安価で入手しやすい材料を使用しており、工具も特殊なものは使わず、100円ショップやDIYショップで容易に手に入る工具で加工している。「作る楽しさ」を実感しながら作ったロボット。 Characteristics: 全体制御、台車制御、ハンド制御、色識別、格納部制御の5つの部位にそれぞれAVRマイコンを積み、それらをI2Cバスで接続し、全体として協調作業を行う。 各部はある程度の自律性を持っており、全体制御部からは抽象的なコマンドのみが発せられる(ボールエリアへ移動、ボールを拾え、など)。 |