| Self-content,
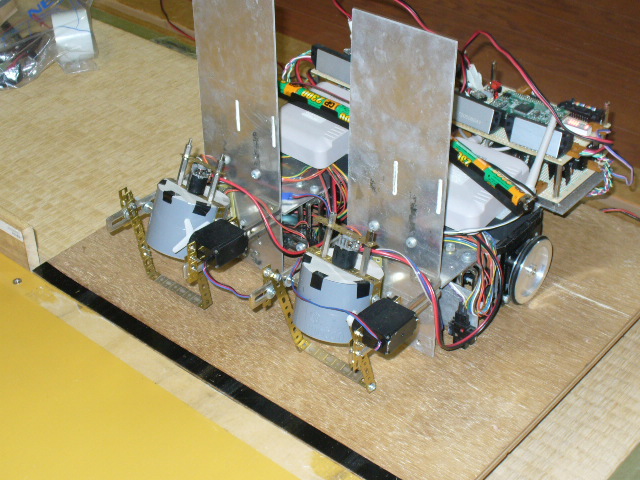
Multi-robots L:400mm * W:200mm * H:300mm, 2kg, 800mm/s Line-trace, Distance sensor, Vision sensor, Co-operation, Hand, Wind, Appeals: このロボットは構造の簡略化を図るため、ボールを一個ずつしか運べません。そこで同じ ような機体を2台用意し、無線によりお互いの状態を確認し協調作業させることで効率化 を図っています。 協調作業を行うロボットにこだわってやってきてます。 Characteristics: ボール探索は距離センサ(PSD)にて扇状に機体を振ることで行っています。 ボール取り込みをファンによる吸い込みで行うことによって、ハンド等使用した場合の 引っかかり等を防止します。 色判別は携帯用カメラにてボールの画像を取り込み色判別を行っております。 |