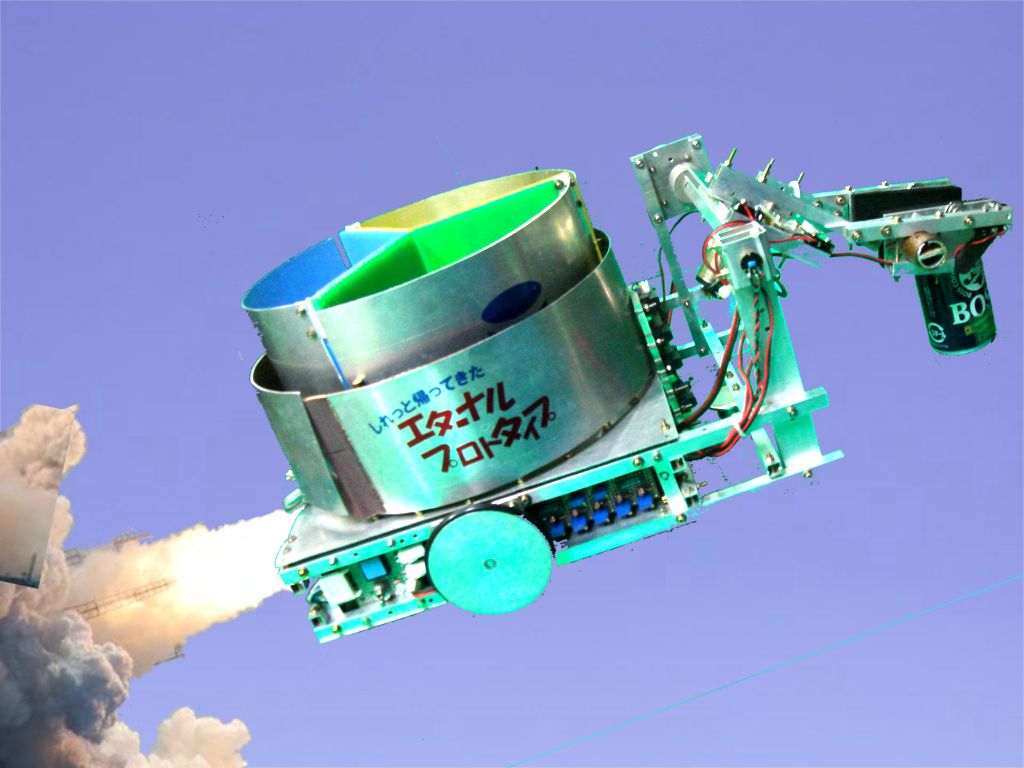
| 自立型,単独型 長360mm×幅280mm×高225mm, 重6kg, 速1000mm/s ライントレース, 距離センサ, 光センサ, ハンド, アピール 回転式ドラムの導入などの、出来る限りシンプルな機構で目的のタスクを可能にするアイデア。 (The simplest mechanism which meets the request by powerful ideas for example using Rotating Drum.) バネの力を利用した一定の圧力でオブジェクトを掴むことの出来るハンド。 (Constant-Power Hand which uses spring's nature) ロボットの特徴 オブジェクトを分別した上で回転式ドラムに格納し、まとめて得点する戦略を取る。 (Our machine classifies objects and saves them in the Rotating Drum severally, and scores at a stretch.) 技術(technology) ・回転式ドラムによるオブジェクトの分別 (Object classification with Rotating Drum) ・ステッピングモーター制御による位置情報の把握 (Location realization by controling stepping motors) ・ラインセンサーによる蓄積誤差の補正 (Revision of positioning error with line sensors) ・PSD距離センサによるオブジェクトの発見 (Object search with PSD sensors) ・オブジェクトの高さによる種類判定 (Decision of object's type by the height) ・スプリングを利用した定圧力ハンドによるオブジェクト捕獲 (Object capture by springed Constant-Power Hand) |