| Self-content,
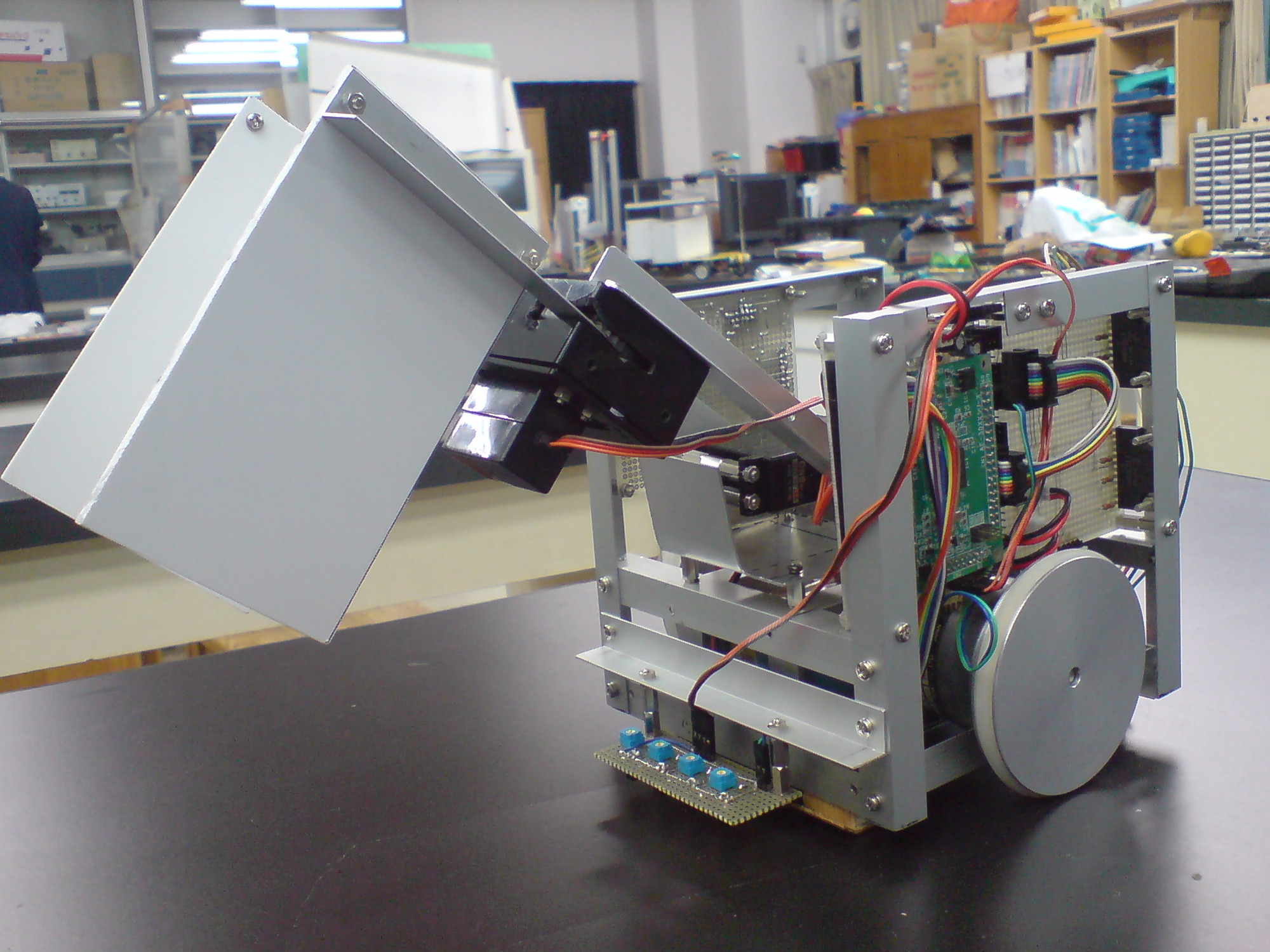
Single-robot L:250mm * W:170mm * H:170mm, 3.0kg, 90mm/s Line-trace, Distance sensor, Sensors using lightwave, Hand, Appeals: 車体は全てアングル材で出来ています。長いアングル材をひたすら切り続けて短くし、ステッピングモーターを覆うようにして台車を作り、さらにアングル材を垂直に取り付け基板などを固定しました。時間もかかり、非常に面倒な車体構造ですが、ちょっとした改造に融通が利き、また、頑丈さでは他のロボットに負けません。 自分が今までに作ったロボットで、一番お金がかかっているわけではありませんが(今までのを流用しているから)、プログラムややる気などは今までとは比べものにならないほど頭を使っています。 Characteristics: 競技台では常にライントレースで移動します。ボールを見つけると、サーボモータによる腕でボールをつかみ、腕の先にあるセンサーで色を判別してから、定位置に移動して正しいゴールに投げ入れます(もしかしたら投げないでゴールまで直接行きます)。 足回りにはステッピングモーター、マイコンにはH8/3052Fを採用しています。充電池を多めに搭載して完全自立型としました。 |