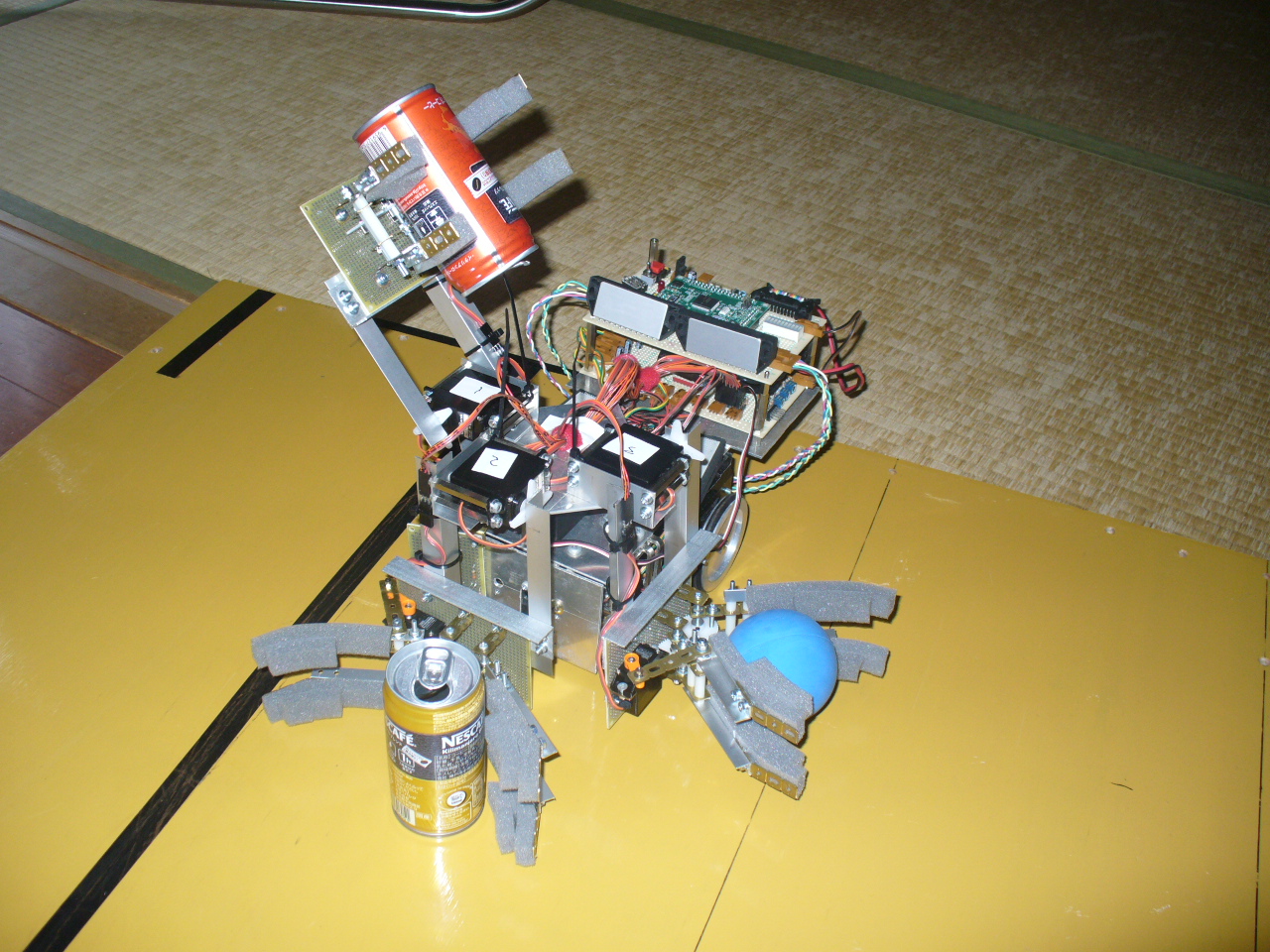
| 自立型,複数型 長350mm×幅180mm×高300mm, 重3kg, 速1000mm/s ライントレース, 距離センサ, ビジョンセンサ, 協調動作, ハンド, アピール 足回り等々、ほとんどの部分はは去年のチャレンジコース優勝機体の物を流用ですが、テクニカルコースに出るにあたりハンド部を作成しました。 対象物が6個のため一回で全部保持できるように、各機体に3個のハンドを搭載しました。これで無駄に往復することなく、また2台協調のため同時に対象物探索が可能なため時間短縮が可能です。 ロボットの特徴 対象物探索・・・前面および左右両サイドに付いたPSDにより対象物を探索。 色および対象物判別・・・カメラにより色を判別ならびに、缶についてる黒帯で缶かボールを判別 協調動作・・・bluetoothによりPC経由でお互いの状況を確認しながら邪魔をしないように動作 |