| Self-content,
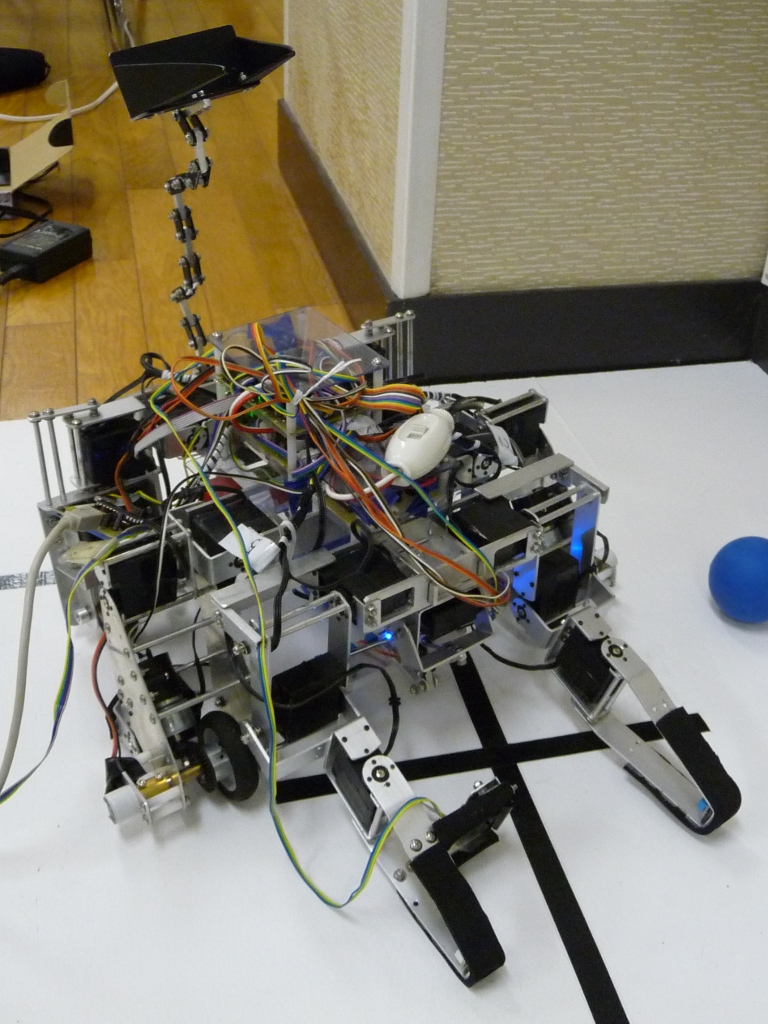
Single-robot L:350mm * W:350mm * H:300mm, 3.0kg, 500mm/s Line-trace, Dead-reconing, Distance sensor, Sensors using lightwave, Hand, Appeals: ハンドでボールを運ぶ以外にも取り付けた尻尾などを使用して,多彩なボールの入れ方を見せるつもりです. Characteristics: 本ロボットは6脚歩行ロボットであるが,前足2本をハンドとして使用し後ろの4本の脚で4脚歩行を行うことも可能である.また後ろの4本の脚につけた車輪での走行も可能であり,旋回もできるように設計してある.これらすべての動作を行うため前,中,後の3本の脚はすべて違う形状である. |