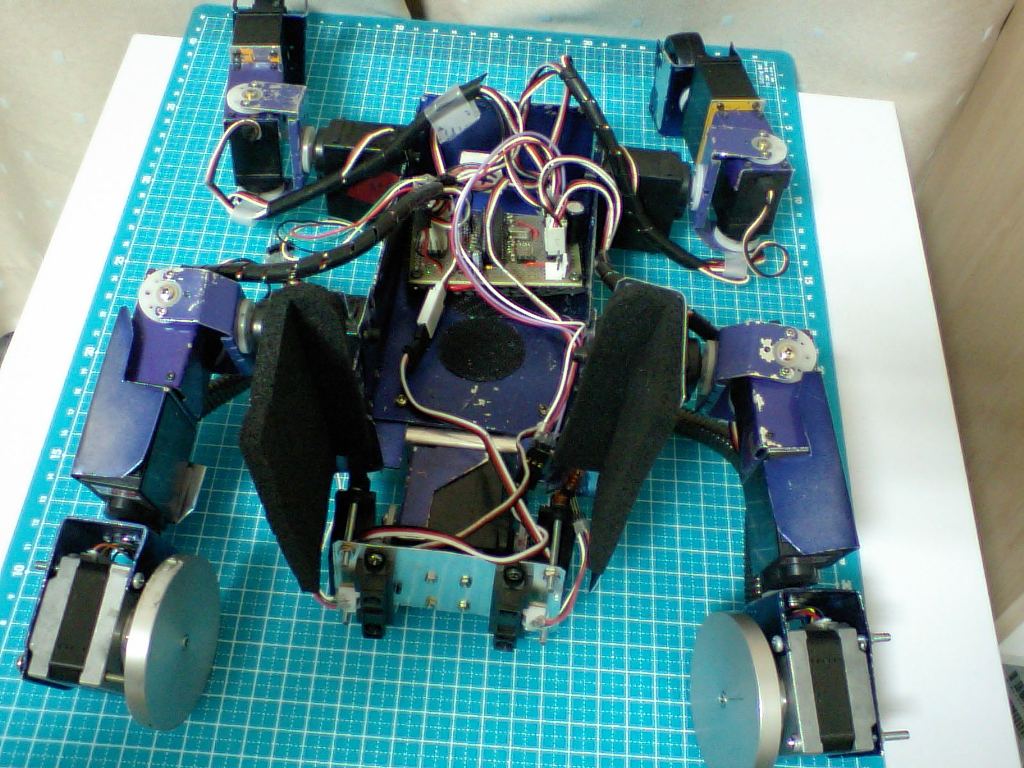
| 自立型,単独型 長---mm×幅---mm×高---mm, 重---kg, 速---mm/s デッドレコニング, 距離センサ, ハンド, アピール 昨年の機体"四拍子"に手直しを加えた機体です。 ボールのカラー判定については時間的・技術的制約もあり見送りましたが、その分1つでも多くボールをとりに行きます。 四拍子では不完全に終わった、四脚四輪での華麗な走行をお見せしたいと思います。 ロボットの特徴 動作方法は4輪走行(前方2輪のステッピングモータによる駆動)です。 4脚の脚は各3個ずつのサーボモータで制御し、歩行動作も可能です。 |