OWARI III(OWARI III)
YF(YF)
名古屋工業大学ロボコン工房
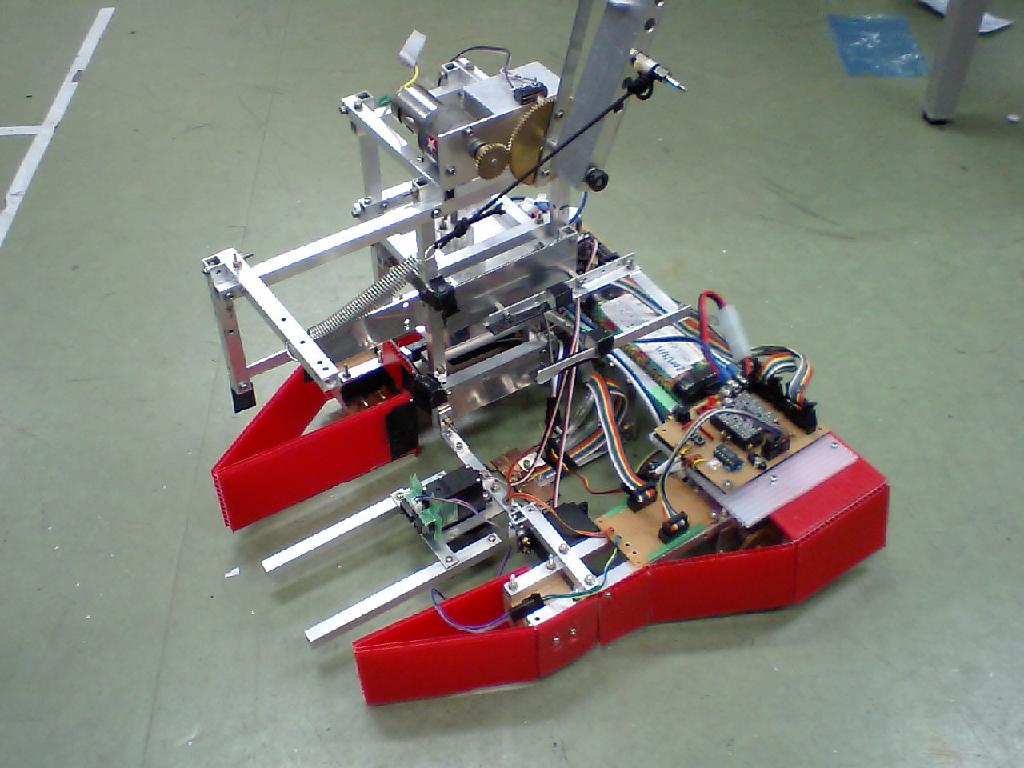
自立型,単独型
長380mm×幅400mm×高320mm, 重3.3kg, 速450mm/s
ライントレース, デッドレコニング, 距離センサ,
ハンド,
アピール
豪快にボールを打ち出す動作と、ウロウロとボールを探す動作にギャップを感じます。
ロボットの特徴
コースの前半部分でのみライントレースを行い、後半はオドメトリによる自己位置推定をもとに走行します。DCモータを使って走行し、PSDでボールを探します。確保したボールはその場からゴールへと直接打ち出します。また、動作状況を音で知らせます。
競技結果:
一次 競技点: 11.00 審査点: --- 補正: 0 合計:11.00 パ: --- チャ: --- 芸:--- 速:---
二次 競技点: 18.00 審査点: 38.00 補正: 0 合計:56.00 パ: 16.00 チャ: 7.50 芸:7.25 速:7.25
決勝 競技点: 35.00 審査点: 38.67 補正: 0 合計:73.67 パ: 16.67 チャ: 7.67 芸:7.00 速:7.34