| Self-content,
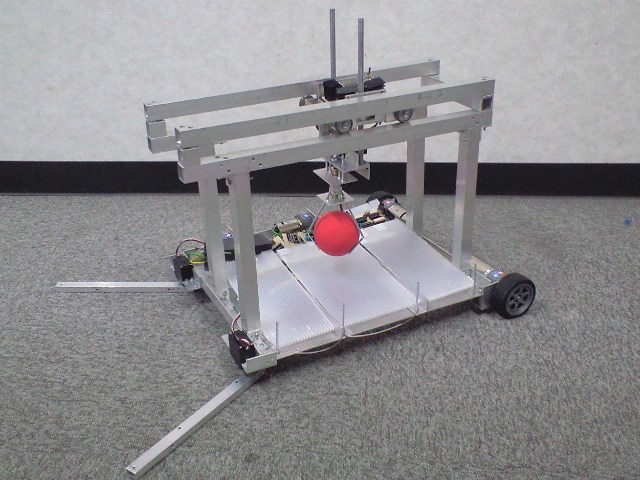
Single-robot L:450mm * W:400mm * H:400mm, 5kg, 800mm/s Line-trace, Vision sensor, Hand, Appeals: ロボティクス研究会の先代では使われていなかったPICマイコンを多用して製作してます。それぞれの機構にひとつずつPICを内蔵して機構ごとにプログラムを分けて作動させてるので、中央にある統合制御のマイコンにかかる負荷が軽減できるようになりました。これにより、全体的な回路の小型化をしています。 Characteristics: 移動は基本的にライントレースで行います。ボール回収は、ボール配置ゾーンを一回通過するだけで全てのボールを回収できるようにします。回収したボールはUFOキャッチャーの要領でボールをロボット内に運び、色を識別してためておきます。そしてゴールへ行き、それぞれの色別にボールを転がしてゴールへ入れます。 |