白月-R(白月-R)
岡林 裕樹(岡林 裕樹)
電気通信大学
自立型,単独型
長400mm×幅250mm×高250mm, 重1.5kg, 速300mm/s
デッドレコニング, 距離センサ,
光センサ, ハンド,
アピール
方位・距離などの情報から現在位置を推定し、オブジェクトの射出方向を補正する
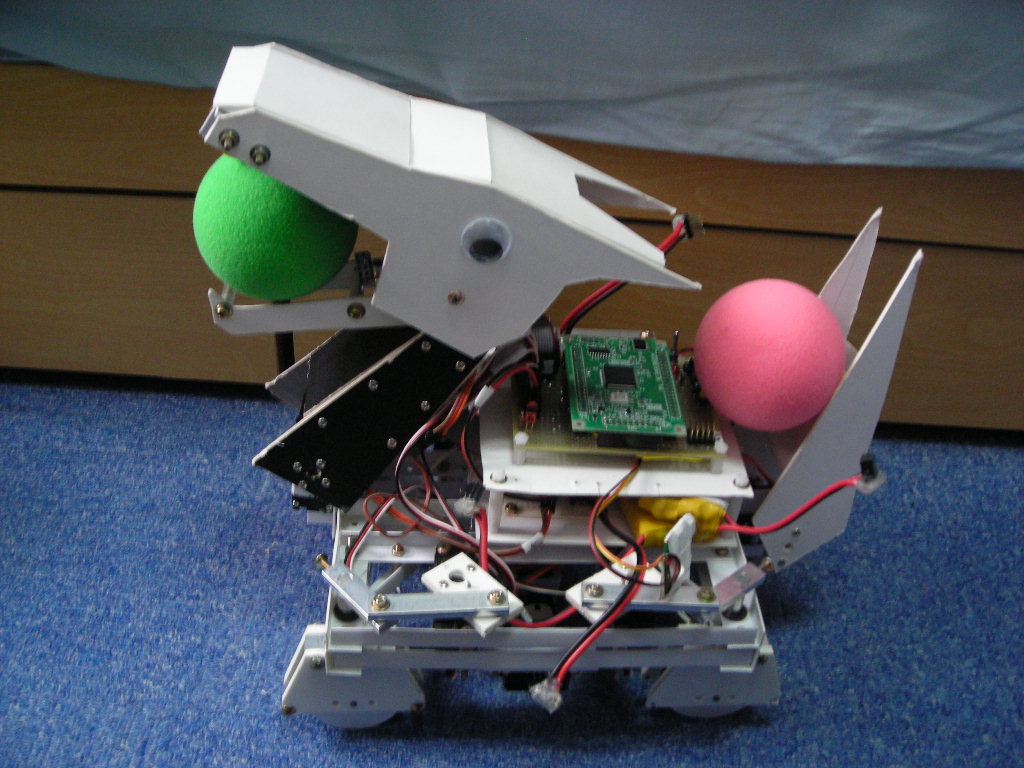
ロボットの特徴
4輪独立駆動・独立操舵の特徴を活かし、方位と壁からの距離、実際の走行距離を頼りにオブジェクトの確保・得点を実現する。
競技結果:
一次 競技点: 0.00 審査点: --- 補正: 0 合計:0.00 パ: --- チャ: --- 芸:--- 速:---