| Self-content,
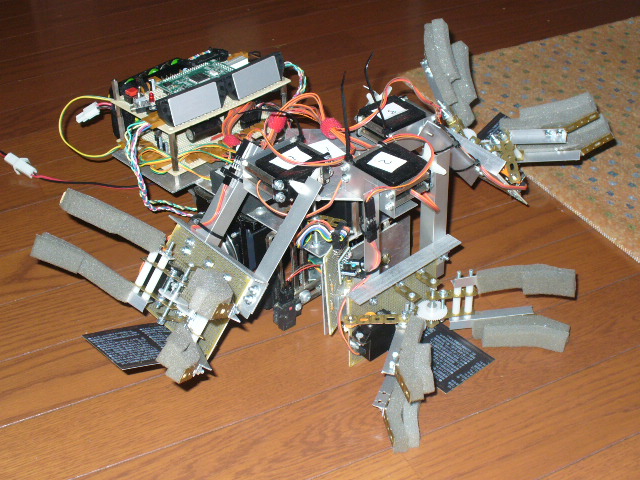
Multi-robots L:330mm * W:170mm * H:300mm, 2kg, 300mm/s Line-trace, Dead-reconing, Distance sensor, Vision sensor, Co-operation, Hand, Appeals: 対象物の探索は、PSDを用いて扇形に機体を振ることによって行っていますが、この方法は時間がかかることが難点でした。 そこで2台同時に走らせ、2カ所別々の方向から探索を行うことにより、時間の短縮を実現しました。 Characteristics: 対象物探索・・・PSDにより距離判別を行っている。 色判別・・・・・携帯用カメラtrevaを使い、画像データを取り込み、RGB各色の差を利用して判別。 機体間通信・・・bluetoothモジュールを使用してシリアル通信を行っている。 |