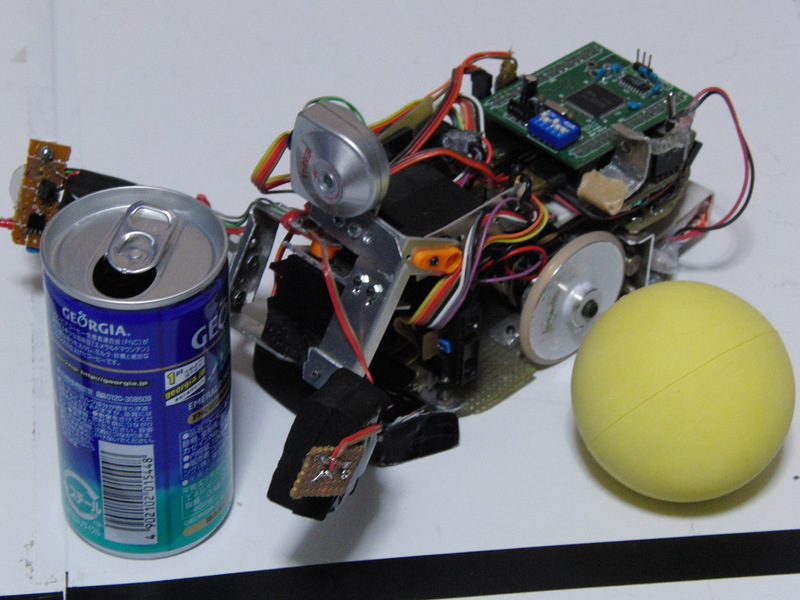
| Self-content,
Single-robot L:160mm * W:80mm * H:110mm, 0.58kg, 1000mm/s Line-trace, Dead-reconing, Distance sensor, Vision sensor, Sensors using lightwave, Hand, Appeals: 平均的参加ロボットよりも小さく、軽いロボットです。コンテストに最適なサイズはもう少し大きいところにあると思われますが、あえて小さくすることに挑戦しています。対象物は1個ずつしか運べませんが、1個をゴールするまでの時間を短縮してタイムトライアルに挑みます。 2007年大会の「風兎2007」のハードウェアを流用しました。ルールの変更にソフトウェアのみでどれだけ対処できるか試してみたいと覆います。 Characteristics: 3個のPSD距離センサーで対象物を探し、ハンドで把持して運びます。手先のCMOSカメラと透過型フォトインタラプタで対象物の色と種類をそれぞれ見分けます。 ガイドラインセンサーにはアナログ式を採用し、たった4個のセンサーしかないにも関わらず高速できめ細かいライントレース制御を実現しています。また単純なライントレースではなく、ラインに沿った1次元座標系での自己位置推定と競技台マップの照合を行っており、曲がり角での減速と交差点誤検出回避を実現しています。 |