| With external devices,
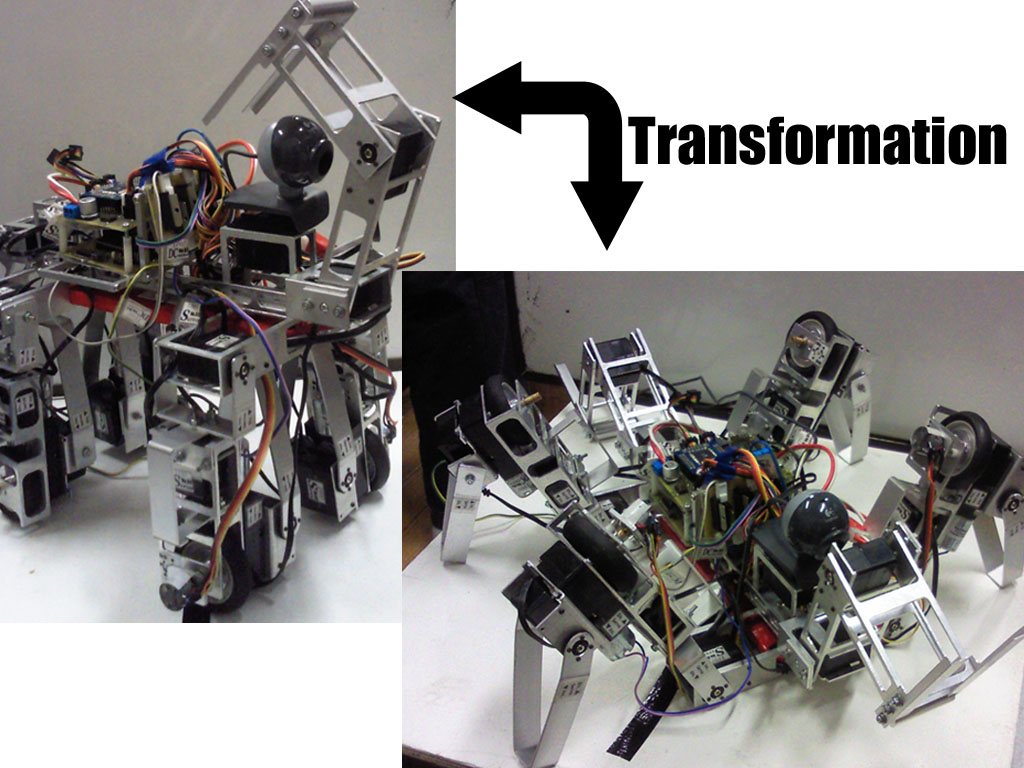
Single-robot L:350mm * W:250mm * H:370mm, 3.5kg, 500mm/s Line-trace, Dead-reconing, Vision sensor, Hand, Appeals: ・(車輪移動⇔4足歩行)のモードの変形を行う ・その他のモードも持つ Characteristics: ・2つのカメラを用いて現在位置・対象物・ゴールを認識 ・カメラの処理はPCで行い,処理データをマイコンに転送 ・ロボット前面・背面2つのハンドで対象物を投げ入れる |