視覚情報利用試験機(視覚情報利用試験機)
メカトロ研究開発機構(メカトロ研究開発機構)
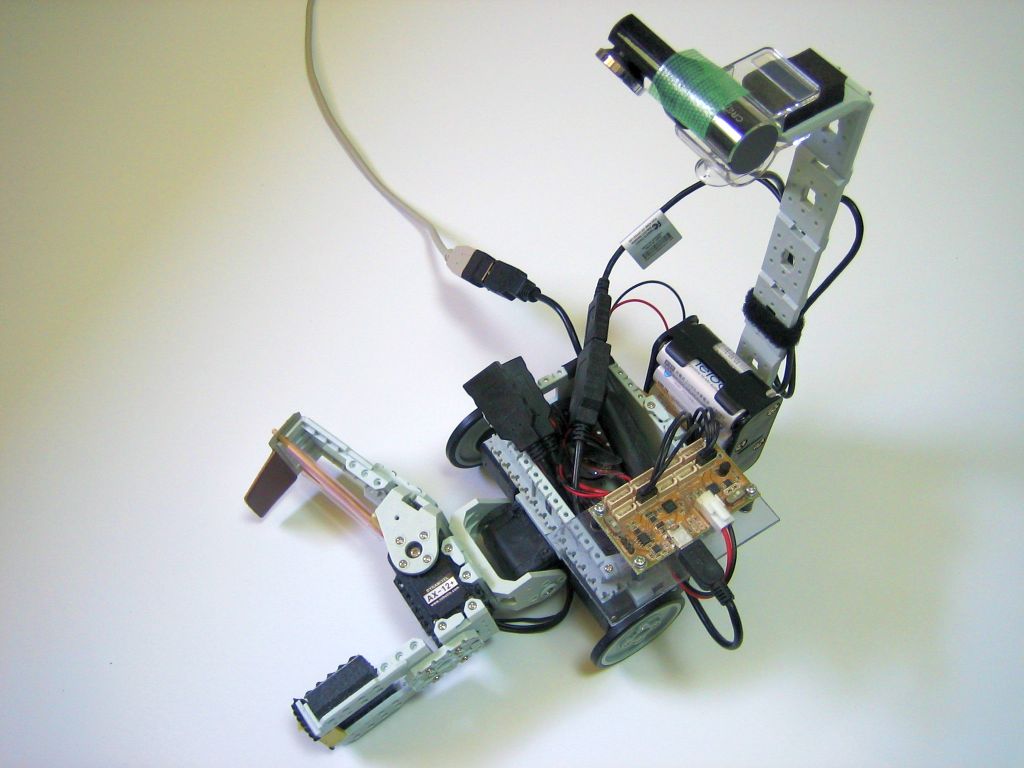
非自立型,単独型
長300mm×幅230mm×高260mm, 重1.1kg, 速50mm/s
デッドレコニング, ビジョンセンサ,
ハンド,
アピール
特定色やエッジといった情報よりも、 特徴空間での統計処理(判別分析)を重視しています。
ロボットの特徴
カメラの画像を中心に制御しています。 駆動輪の回転数からデッドレコニングも行いますが、 精度が出ないこともあり限定的です。
競技結果:
一次 競技点: 5.00 審査点: --- 補正: 0 合計:5.00 技術: --- パフォ: --- チャレ: --- 芸: ---
二次 競技点: 20.00 審査点: 34.00 補正: 0 合計:54.00 技術: 15.20 パフォ: 5.80 チャレ: 7.00 芸: 6.00
決勝 競技点: 41.00 審査点: 37.75 補正: 0 合計:78.75 技術: 17.50 パフォ: 6.00 チャレ: 7.75 芸: 6.50