| Self-content,
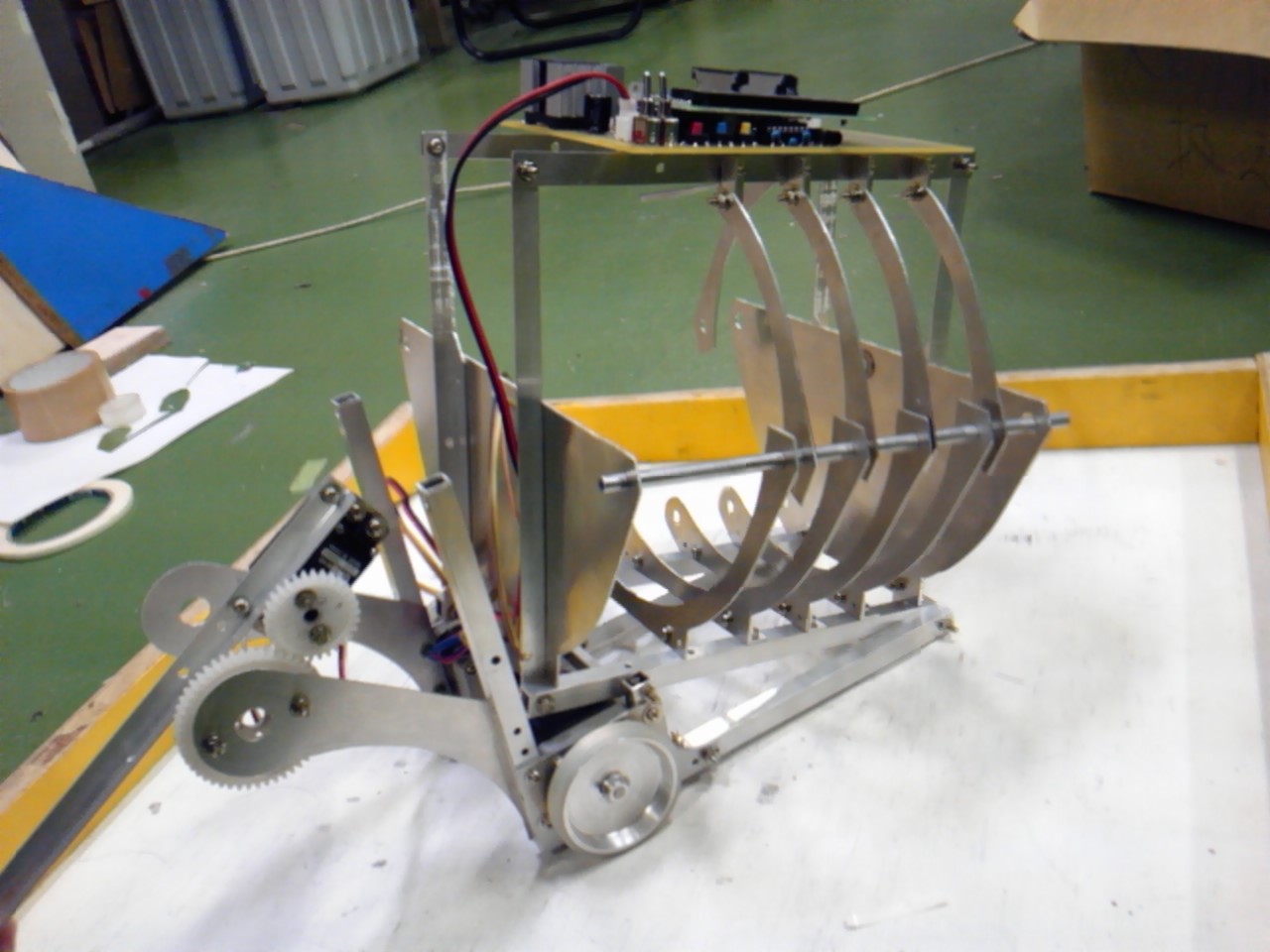
Single-robot L:350mm * W:220mm * H:250mm, 5kg, 100mm/s Line-trace, Distance sensor, Hand, Appeals: #include <iostream> const char* const point = "A WATER WHEEL!"; std::cout << point << std::endl; Characteristics: コース上の黒ラインを読み取り移動補正し走行します。また距離センサでボール・缶との位置関係を確認します。次にアームでボール・缶を取り、格納部(通称水車)に搭載します。最後に、ゴール前では水車の要領でボールを排出します。 |