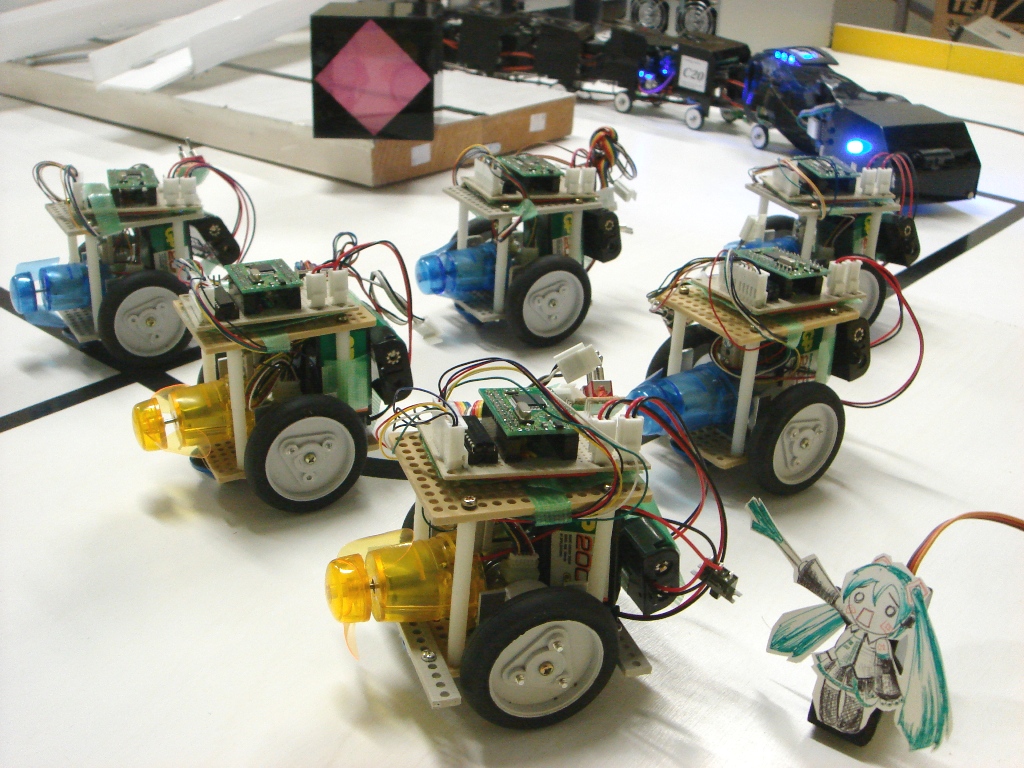
| 自立型,複数型 長100mm×幅100mm×高110mm, 重0.625×9kg, 速96mm/s 距離センサ, 光センサ, 協調動作, 風, アピール 水盆をかき回すと渦ができるように,ロボットがフィールド上を巡ることで“流れ”を生み出したいと思っています. また,それぞれは利己的な動きをしていながら,全体としてはまとまった機能を発現するような群ロボットとしての動きの面白さを表現していきたいと考えております. ロボットの特徴 複数機(9機を予定)の小型ロボットに簡単な移動戦略を持たせ,全体としてはボールを運ぶ動きをみせるような制御系の実現を目指します. 各機はボールと壁,味方機とを見分ける機能,ボールを運ぶファン,落下防止機能などを備えます. |