| With external devices,
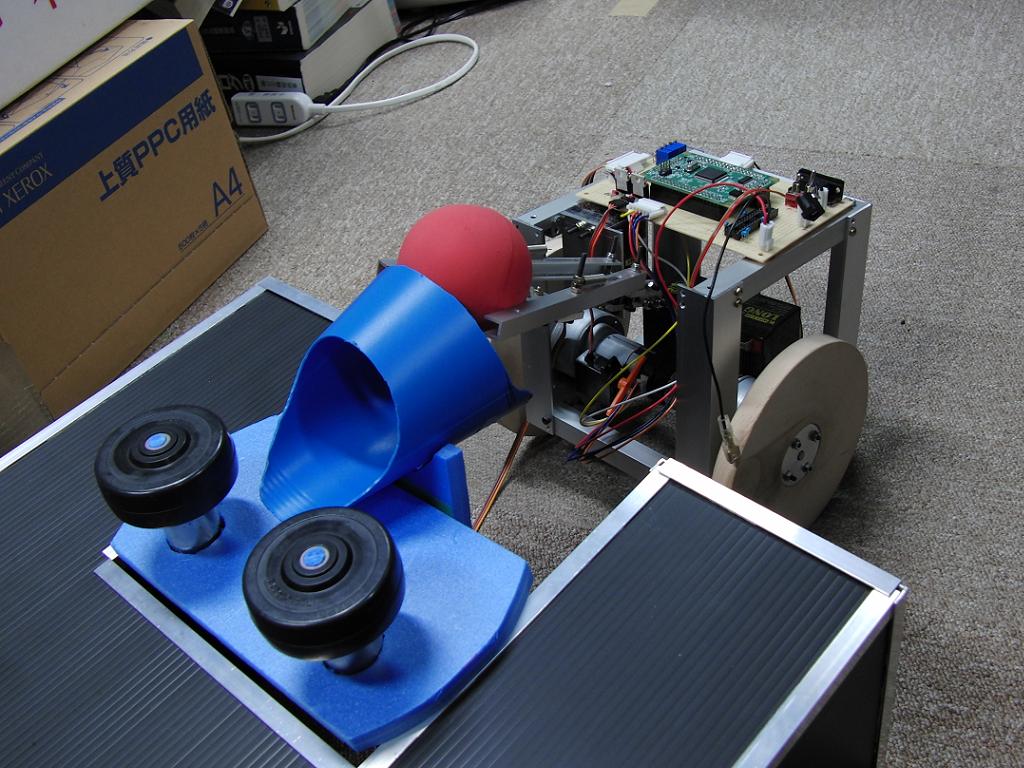
Multi-robots L:400mm * W:400mm * H:250mm, 2kg, 50mm/s Line-trace, Dead-reconing, Distance sensor, Sensors using lightwave, Roller, Hand, Appeals: 助さん・格さんの二機のロボットが情報を伝達しあい作業するという「知的なロボット」の実現を目指した.また助さんと格さんが仕事を分担することで,効率よくゴールを狙えるものと考えている. Characteristics: 二機のロボットを使用する.ボールを検出するロボットを助さん,打ち出すロボットを格さんと名付ける.助さんがアームでボールを挟んで運び,格さんと接触した際にボールを受け渡す.格さんは,受け取ったボールの色を識別し,適したゴールに向けて発射方向を変え,ローラで撃ちだす. 使用マイコンはh8/3052.助さんのセンサは,フォトリフレクタ(ライントレース),PSD(ボール検出),エンコーダ(車輪制御).格さんはフォトリフレクタ(ライントレース),カラーセンサ(ボール色識別)を使用している.助さんと格さんが接触したとき,格さんからの電気信号を助さんのNMIポートに導通させることで接触を感知させる. |