| Self-content,
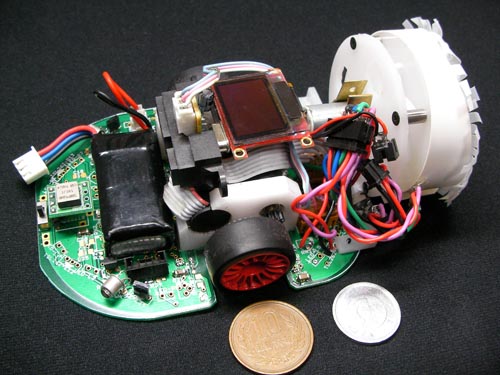
Single-robot L:150mm * W:80mm * H:53mm, 0.14kg, 3500mm/s Dead-reconing, Distance sensor, Sensors using lightwave, Wind, Appeals: スイッチは電源用しかなく、有機ELディスプレイを頼りにエンコーダ値(ホイール)が入力装置です。 ロボットの重さに対してボールが重すぎて困ります。が、ぎゅんぎゅん動いて、ラストは『期待』に応えようと思います。 その名に恥じぬ働きを!! Characteristics: ラインセンサが無く、エンコーダ値をメインにPSDとジャイロ、赤外センサで自己位置を補正しながら走ります。 DCモータ制御はPIDフィードバックとFFです。 ファンも自作でNCで削りだしたものを使っています。 |