| Self-content,
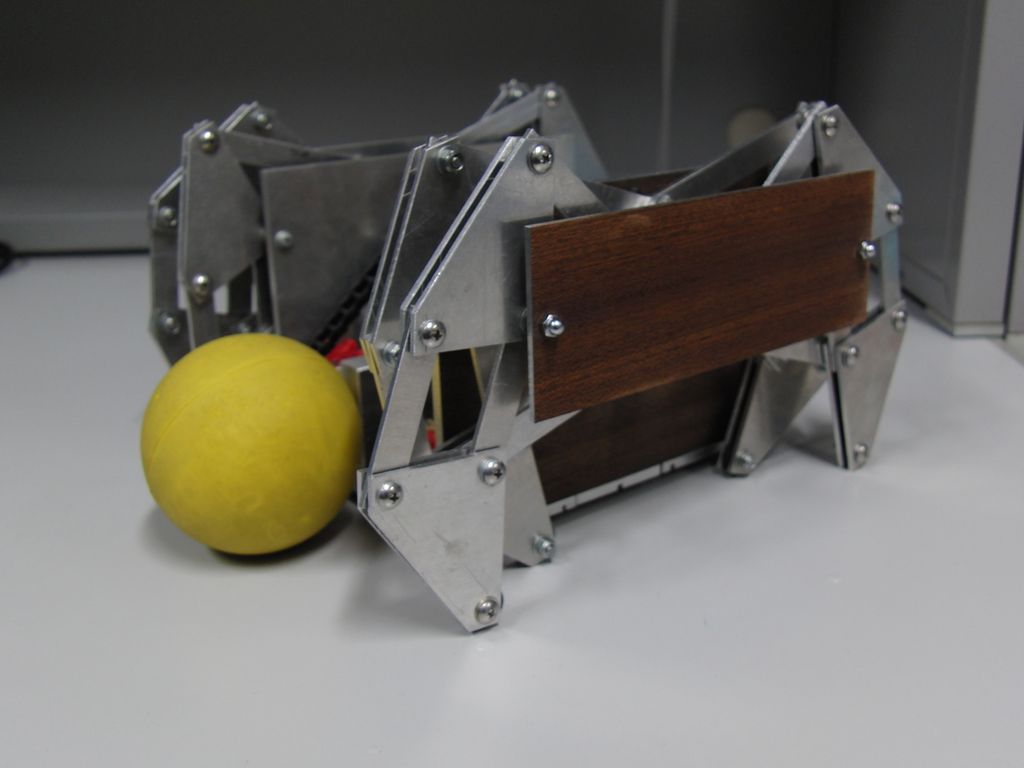
Single-robot L:250mm * W:250mm * H:250mm, 2kg, 200mm/s Line-trace, Dead-reconing, Distance sensor, Hand, Appeals: リンク機構によるスムーズな歩行がアピールポイントです.また小型でありながら複数のボールを運搬することを目標としています. Characteristics: オランダ人アーティストのテオ・ヤンセン氏が考案したリンク機構により歩行を行うロボットです. |