四角木馬(四角木馬)
茨大ロボ研 UN-team(茨大ロボ研 UN-team)
茨城大学ロボット技術研究会
自立型,単独型
長250mm×幅250mm×高250mm, 重2kg, 速200mm/s
ライントレース, デッドレコニング, 距離センサ,
ハンド,
アピール
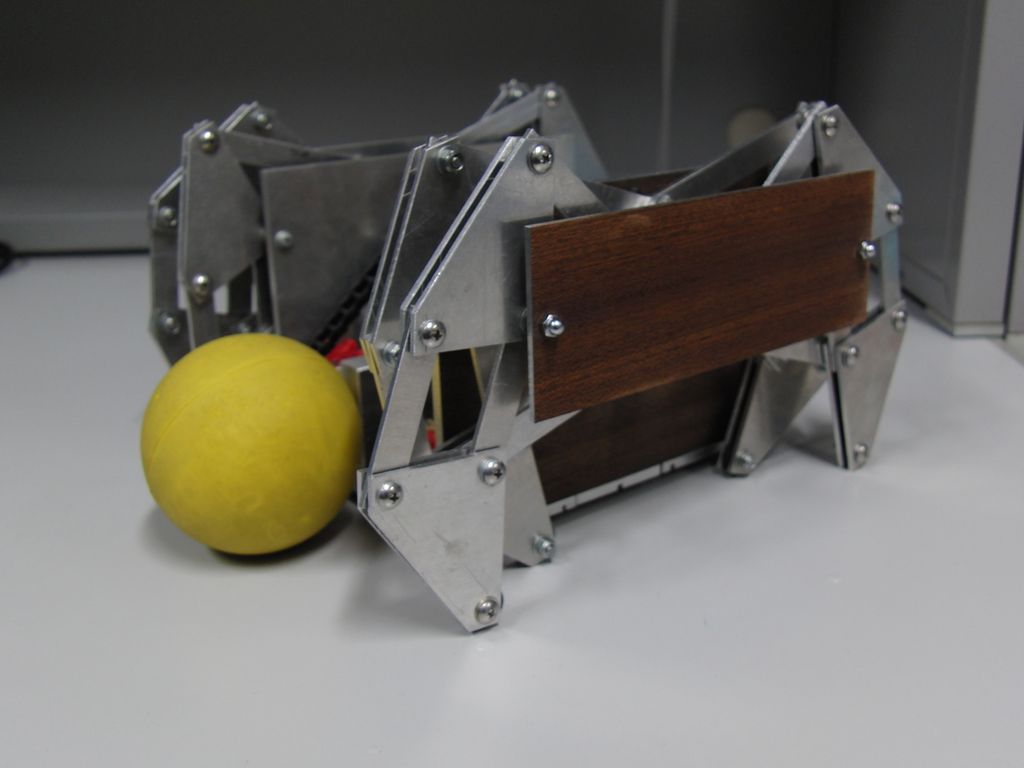
リンク機構によるスムーズな歩行がアピールポイントです.また小型でありながら複数のボールを運搬することを目標としています.
ロボットの特徴
オランダ人アーティストのテオ・ヤンセン氏が考案したリンク機構により歩行を行うロボットです.
競技結果:
一次 競技点: 0.00 審査点: --- 補正: 0 合計:0.00 パ: --- チャ: --- 芸:--- 速:---
二次 競技点: 5.00 審査点: 33.60 補正: 0 合計:38.60 パ: 14.80 チャ: 7.40 芸:5.80 速:5.60