| Self-content,
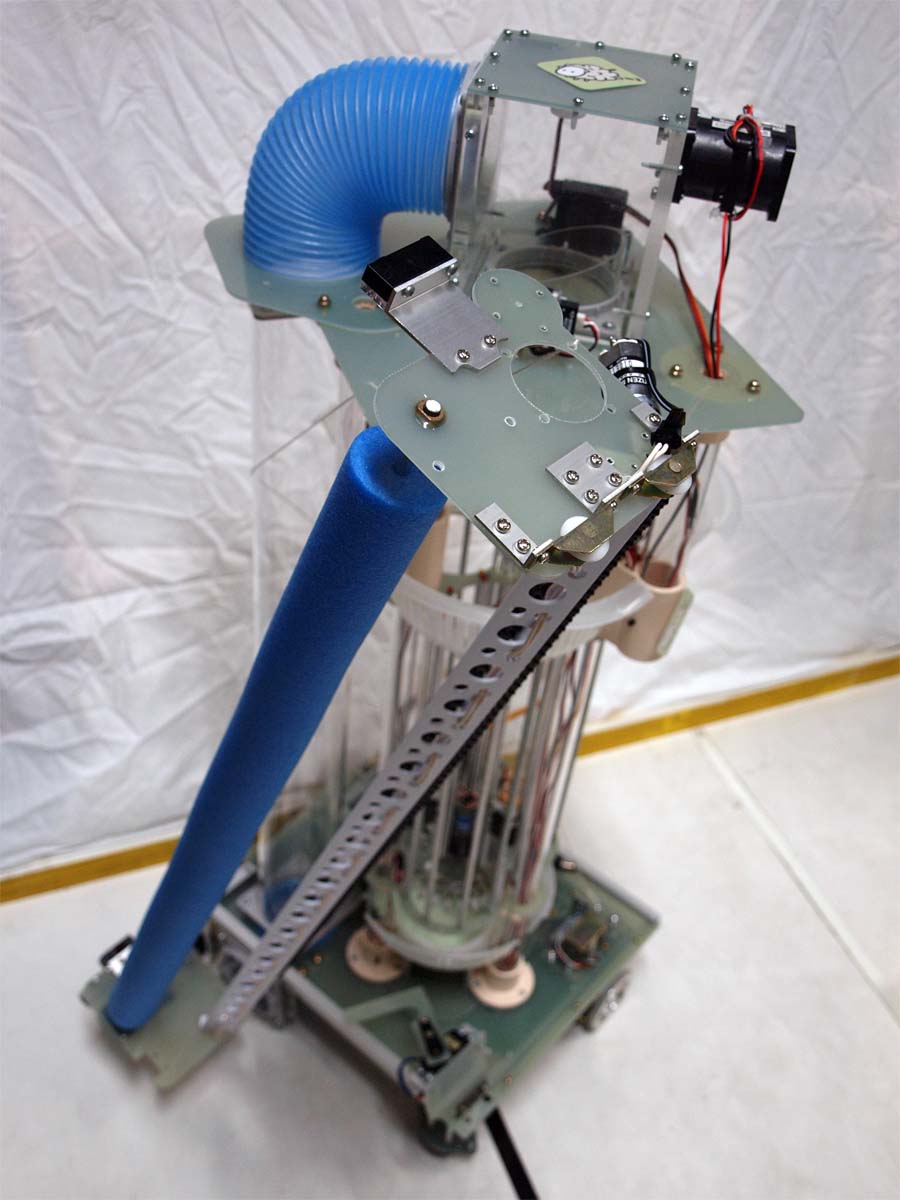
Single-robot L:450mm * W:450mm * H:890mm, 8kg, 300mm/s Dead-reconing, Sensors using lightwave, Roller, Wind, Appeals: 去年の雪辱戦です。大幅にダイエットしました。ボールも一気に最上部まで吸い上げます。しかし、去年の敗因がアクシデントと原因不明のセンシングミスだったので、完全な対策ができません。なぜ、試走台ではOKなのに、競技台でだけトラブルが... ロボコンはそういうものですかね。できるだけのことはやりました。現在、こちらでは問題なく動いています。5分以内に余裕を持って動作を完了できる設定です。ボール配置などの運もありますが、5分以内のパーフェクトを目指します。 Characteristics: ローラーで取り込んで、ラダーチェーンで移動。風で吸い込んで、色分けして格納。下にある円盤とRCサーボモータを使って、ボールを1個ずつ出し、回転するローラーで飛ばしてゴールです。競技台上のボールが縦に並んでいると、どうしても後方に弾いてしまうので、このボール(機体の下に入り込む場合もあります)にロボットが乗り上げて、向きが変わってしまったり、止まってしまったりしないように、長いコロを付けて、何とか回避しました。吸い上げ、分別時にも、ボールの摩擦による詰りを解消することに苦労しました。なお、自由ボールの放出は(滅多に失敗しませんが)、横移動(縦移動用タイヤを持ち上げてフェンス伝いに動きます)始動時の慣性に頼っているので(このためにだけにモータを追加したくなかったので)、ここには多少不安があります。 |